![]() Manual pamaké
Manual pamaké![]()

Déklarasi Hak Cipta
Teu aya unit atanapi individu anu tiasa nimba, nyusun, narjamahkeun, atanapi ngahasilkeun deui eusi manual ieu (contona: dokuméntasi téknis, parangkat lunak, jsb.), atanapi nyebarkeun dina bentuk naon waé (kaasup bahan sareng publikasi) tanpa idin tinulis ti Shenzhen Elephant Robotics Technology Co. ., Ltd. (satuluyna disebut "Gajah Robotics").
Salaku tambahan, inpormasi produk sareng sumber anu aya hubunganana anu disebatkeun dina manual ieu ngan ukur pikeun rujukan sareng eusina tiasa robih tanpa aya bewara.
Iwal sakumaha dinyatakeun dina manual ieu, euweuh dina manual ieu kudu ditaksir salaku jaminan atawa jaminan ku Elephant Robotics tina leungitna pribadi, ruksakna harta, atawa kabugaran pikeun tujuan nu tangtu. Sadaya hak disimpen!
|
Vérsi |
Katerangan |
Catetan |
| V 2020.12.31 | Ditambahkeun gambar myCobot【set standar】, Majelis Dasar, sareng Majelis Akhir | |
| V 2021.02.04 | Ditambahkeun gambar tina Sistem Koordinat, Software MyStudio |
Leuwihview
Ngeunaan manual
Wilujeng sumping nganggo robot kolaborasi MyCobot sareng hatur nuhun kanggo pameseran anjeun.
Buku manual ieu ngajelaskeun pancegahan pikeun pamasangan sareng panggunaan MyCobot anu leres. Punten baca manual ieu sareng manual anu aya hubunganana sacara saksama sateuacan masang sistem robot ieu. Saatos maca, mangga simpen dina tempat anu aman supados anjeun tiasa ngaksés iraha waé. Maca objék tina manual
Manual ieu ditujukeun pikeun:
- pamasang.
- Debugger.
- Staf pangropéa.
 |
Jalma anu masang / debug / ngajaga robot kolaborasi MyCobot kedah dilatih dina Elephant Robotics sareng gaduh pangaweruh mékanis sareng éléktronik anu diperyogikeun pikeun padamelan di luhur. |
Kumaha ngagunakeun
Buku manual ieu kedah dianggo nalika ngalakukeun padamelan di handap ieu:
- Karya pamasangan: Pindahkeun robot ka posisi damel sareng ngalereskeun kana dasarna dumasar kana petunjuk pamasangan.
- Debugging: Debugging robot pikeun status jalan.
- Karya pangropéa: sistem robot pangropéa biasa pikeun mastikeun fungsi normal na. Nalika robot gagal kusabab pangaruh lingkungan atanapi operasi pangguna anu henteu leres, atanapi komponén tinangtu sistem robot ngaleuwihan umur jasa normal, robot kedah dilereskeun.
Catetan:
- Manual ieu lumaku pikeun pamaké internasional, kitu ogé pamaké di Hong Kong, Makau, jeung Taiwan.
- Manual ieu teu diropéa rutin. Tanggal diropéa nyaéta nomer versi. Pamaké bisa ngundeur versi panganyarna tina resmi websitus Gajah Robot iraha wae.
Kaamanan
Bab ieu ngécéskeun inpormasi kaamanan umum pikeun jalma anu ngalaksanakeun pamasangan, pangropéa, sareng perbaikan dina robot. Mangga baca sareng ngartos eusi sareng pancegahan tina bab ieu sateuacan nanganan, masang, sareng ngagunakeunana.
1.1 Idéntifikasi Hazard
Kasalametan robot kolaborasi dumasar kana premis konfigurasi ditangtoskeun jeung pamakéan robot, komo lamun sagala parentah kaamanan dititénan, tatu atawa karuksakan disababkeun ku operator masih bisa lumangsung. Kukituna, penting pisan pikeun ngartos bahaya kasalametan pamakean robot, anu mangpaat pikeun nyegah masalah sateuacanna.
Tabél 1-2~4 di handap ieu mangrupikeun bahaya kaamanan umum anu tiasa aya dina konteks ngagunakeun robot:
Tabél1- 2 Bahaya kaamanan anu bahaya
 |
|
| 1 | tatu pribadi atawa karuksakan robot disababkeun ku operasi salah salila penanganan robot. |
| 2 | tatu pribadi atawa ruksakna robot disababkeun ku robot teu dibereskeun sakumaha diperlukeun, contonaample, screw teu ngaco atanapi tightened, sarta dasarna teu cukup pikeun stably ngarojong robot pikeun gerakan-speed tinggi, ngabalukarkeun robot mun tip handap. |
| 3 | Gagalna ngalaksanakeun konfigurasi fungsi kaamanan anu leres tina robot, atanapi pamasangan alat panyalindungan kaamanan, jsb., tiasa nyababkeun fungsi kaamanan robot gagal. |
Tabél1- 3 Résiko kaamanan tingkat peringatan
 |
|
| 1 | Maén di sabudeureun jeung robot, Anjeun bisa jadi katandangan robot ngajalankeun, atawa jadi tripped ku halangan saperti kabel ngabalukarkeun tatu pribadi. |
| 2 | tanaga nu teu sah ngarobah parameter konfigurasi kaamanan, ngabalukarkeun fungsi kaamanan gagal atawa bahaya. |
| 3 | Goresan sareng tusukan disababkeun ku permukaan anu seukeut sapertos alat-alat sanés di lingkungan kerja atanapi éféktor tungtung robot. |
| 4 | Robot nyaéta mesin precision sarta pedaling bisa ngabalukarkeun karuksakan kana robot. |
|
5 |
Lamun clamp teu di tempat atawa saméméh catu daya tina robot dipareuman atawa sumber gas dipareuman (teu ditangtukeun naha effector tungtung pageuh nahan objék tanpa ragrag kaluar alatan leungitna kakuatan). Lamun clampobyék henteu dipiceun, éta tiasa nyababkeun bahaya, sapertos jalma anu cilaka ku nabrak. |
| 6 | Aya résiko tina gerakan teu kahaja tina robot. Dina kaayaan naon waé anjeun kedah nangtung dina sumbu robot! |
| 7 | Robot nyaéta mesin precision. Lamun teu disimpen mulus salila penanganan, éta bisa ngabalukarkeun Geter tur bisa ngabalukarkeun karuksakan kana komponén internal tina robot. |
Tabél 1-4 Poténsi bahya kaamanan anu tiasa nyababkeun shock listrik
 |
|
| 1 | Nganggo kabel anu henteu asli tiasa nyababkeun bahaya anu teu dipikanyaho. |
| 2 | Kontak sareng cairan ku alat listrik tiasa nyababkeun résiko bocor listrik. |
| 3 | Bisa jadi aya bahaya shock listrik lamun sambungan listrik salah. |
| 4 | Pastikeun pikeun nanganan karya ngagantian sanggeus mareuman kakuatan ka controller jeung alat patali jeung cabut kabel kakuatan. Upami pagawéan dilaksanakeun nalika kakuatan hurung, éta tiasa nyababkeun shock listrik atanapi gangguan. |
1.2 Pancegahan Kasalametan
Aturan kaamanan di handap ieu kedah dituturkeun nalika nganggo robot kuring:
- mycobiota nyaéta pakakas listrik. Teknisi non-profésional teu tiasa ngarobih kawat, upami henteu, éta rentan ka ngaruksak alat atanapi jalma éta.
- Tanda BAHAYA, PERHATOSAN dina manual ieu ngan ukur tambahan pikeun pancegahan kaamanan.
- Punten nganggo mycobiota dina lingkup lingkungan khusus. Lamun henteu, ngaleuwihan spésifikasi jeung kaayaan beban bakal shorten umur layanan produk malah ngaruksak alat.
- Sateuacan ngoperasikeun sareng ngajaga mycobiota, tanaga anu tanggung jawab pikeun pamasangan, operasi, sareng pangropéa kedah dilatih pikeun ngartos sagala rupa pancegahan kaamanan sareng metode operasi sareng perawatan anu leres.
- Entong nganggo mycobiota dina iklanamp lingkungan pikeun lila pikeun nyegah karuksakan, myCobot milik komponén éléktronik precision.
- Entong nganggo mycobiota dina lingkungan suhu luhur. Beungeut luar mycobiota dijieunna tina résin photosensitive salaku bahan baku, suhu luhur bakal ngaruksak cangkang jeung ngakibatkeun gagalna.
- Pembersih anu kacida korosif henteu cocog pikeun meresihan mycobiota. Komponén anodized henteu cocog pikeun beberesih immersion.
- Entong nganggo robot kuring tanpa dasar dipasang pikeun ngahindarkeun karusakan alat atanapi kacilakaan. myCobot kedah dianggo dina lingkungan anu tetep sareng teu pikaresepeun.
- Ulah make adaptor kakuatan séjén pikeun suplai kakuatan ka myCobot Lamun ruksak alatan pamakéan hiji adaptor nonconforming, eta moal kaasup kana layanan sanggeus-jualan.
- Mangga ulah ngabongkar atawa unscrew screws jeung cangkang maranéhanana. Upami dibuka, teu aya jasa garansi anu tiasa disayogikeun.
- Jalma teu bisa ngalereskeun myCobot tanpa latihan profésional. Upami aya masalah sareng robot kuring, mangga ngahubungi insinyur dukungan téknis myCobot dina waktosna.
- Mangga sasuai jeung hukum relevan pikeun nungkulan mycobiota scrapped, sarta ngajaga lingkungan.
- Ulah ngantep barudak ulin jeung robot kuring sorangan. Sadaya prosés kedah diawaskeun nalika ngajalankeun. Saatos prosés réngsé, punten mareuman alat-alat éta.
- Dilarang ngarobih atanapi ngahapus nameplates, petunjuk, ikon, sareng tanda dina panangan robot sareng alat anu aya hubunganana.
- Ulah kaduruk drivers produk séjén ka terminal Atom. Upami alatna ruksak kusabab éta, éta moal kalebet dina jasa saatos penjualan.
Punten ulah nganggo robot kolaborasi Chatbot pikeun tujuan ieu. - aplikasi médis sarta hirup-kritis.
- Dina lingkungan anu tiasa nyababkeun ledakan.
- Dipaké langsung tanpa assessment résiko.
- Teu cukup pamakéan tingkat fungsi kaamanan.
- Pamakéan inconsistent parameter kinerja robot.
Upami anjeun gaduh patarosan ngeunaan manual ieu mangga buka sareng kirimkeun tanggapan anjeun ngeunaan:https://www.elephantrobotics.cn.
1.3 Skenario pamakéan
Ngeunaan mycobiota
2.1 Latar
Upholding misi "Nikmati Robot Dunya", Gajah Robotics dirancang jeung ngembangkeun mycobiota, robot kolaboratif pangleutikna jeung hampang di dunya, nahan lolobana pungsi robot industri. Kalayan desain industri anu kompak sareng elegan, kinerja anu saé sareng kuat, sareng parangkat lunak sareng rohangan pangembangan hardware anu ageung, myCobot ngagaduhan kamungkinan anu henteu terbatas dina ékspansi aplikasi.
Prototipe desain mycobiota nyaéta tina Robot Sadaya-dina-hiji anu diluncurkeun ku Robot Gajah di Cina dina 2018. Salaku robot kolaborasi terpadu munggaran di China, éta parantos kéngingkeun Penghargaan Inovasi Robot Industri CAIMRS 2019 sareng Robot Berteknologi Tinggi 2019 Taunan "Inovasi. Téknologi bangsal", sarta ogé geus dijual ka leuwih ti 30 nagara di imah jeung di mancanagara, narima pujian unanimous sarta pangakuan ti pabrik tina luhureun 500 usaha di dunya.
2.2 Bubuka
mycobiota mangrupikeun robot kolaboratif genep sumbu pangleutikna sareng pangleutikna di dunya, diproduksi babarengan ku Elephant Robotics sareng M5Stack. Éta langkung ti alat produktivitas anu pinuh ku imajinasi, tiasa ngalaksanakeun pangwangunan sekundér numutkeun tungtutan pangguna pikeun ngahontal kustomisasi pribadi.
Kalayan beurat 850g, payload 250g, sareng panjang leungeun 350mm, myCobot kompak tapi kuat, henteu ngan ukur tiasa dicocogkeun sareng rupa-rupa éféktor tungtung pikeun adaptasi kana rupa-rupa skenario aplikasi ogé ngadukung pangembangan sekundér. Parangkat lunak multi-platform pikeun nyumponan kabutuhan rupa-rupa skénario sapertos panalungtikan ilmiah sareng pendidikan, bumi pinter, industri ringan, sareng aplikasi komérsial.
myCobot - Parameter Dasar
| Gelar Kabébasan | 6 |
| Payload | 250g |
| Rentang panangan | 350 mm |
| radius gawé | 280 mm |
| Repeatability | ± 0.5 mm |
| Beurat | 850g |
| Input kakuatan | 8V, 5A |
| Kaayaan Gawé | -5°~45° |
| Komunikasi | USB Tipe-C |
2.3 Fitur
- Desain Industri Unik & Kacida Kompak
mycobiota mangrupikeun desain modular terpadu sareng beuratna ngan 850g anu gampang pisan dibawa. Struktur awakna sadayana kompak sareng suku cadang anu langkung sakedik sareng tiasa gancang dibongkar sareng diganti pikeun ngawujudkeun plug and play. - Konfigurasi luhur & Dilengkepan 2 Layar
myCobot ngandung 6 motor servo-kinerja luhur kalayan réspon gancang, inersia leutik, sareng mulus
rotasi. Awak mawa 2 layar tampilan ngarojong perpustakaan puasa pikeun nembongkeun aplikasi dimekarkeun
adegan leuwih gampang jeung jelas. - Lego Panyambung & Rébuan M5STACK Ecological Aplikasi
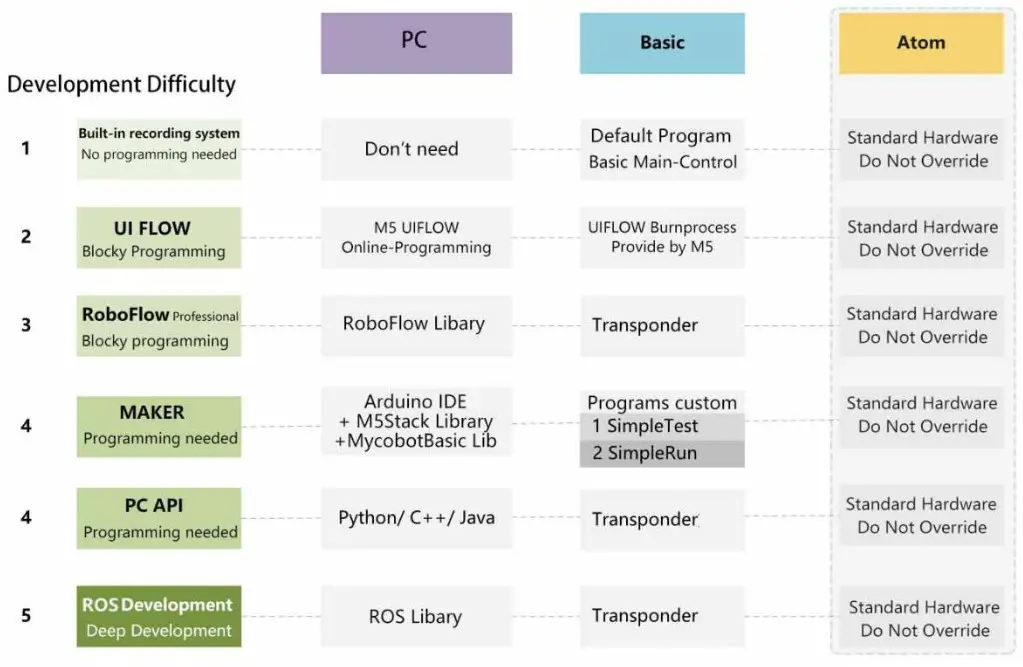
Dasar sareng tungtung mycobiota dilengkepan Panyambung Lego, anu cocog pikeun pamekaran sababaraha alat anu dipasang miniatur. Dasarna dikawasa ku M5STACK Basic, sareng rébuan kasus aplikasi tiasa dianggo langsung. - Blocky Programming & ngarojong Industrial naros
Ngagunakeun software programming visual UIFlow, programming robot abdi basajan tur gampang for everyone.
Anjeun ogé tiasa nganggo RoboFlow, parangkat lunak robot industri ti Elephant Robotics, ngadukung sababaraha modul fungsional Arduino + ROS open-source system. - Rekaman lagu & Diajar ku leungeun
Nyingkirkeun modeu nyimpen titik tradisional, myCobot ngadukung pangajaran uji coba sered pikeun ngarékam lagu anu disimpen sareng tiasa ngahémat lagu-lagu anu béda-béda dugi ka 60mnt.
2.4 Patén-patén
Patén-patén patali ngeunaan robot kuring
|
No. |
Sertipikat No. | Ngaran Patén | Patén No. |
Patén |
| 1 | No.8194138 | Hubungan panangan mékanis sareng panangan mékanis | ZL 2018 20017484.4 | Robotika Gajah |
| 2 | No.8186088 | Panyambung gabungan panangan mékanis sareng panangan mékanis | ZL 2017 21700594.2 | Robotika Gajah |
| No. | produk | Patén Tipe | Judul |
Patén No. |
| 1 | panangan robotic lightweight | Patén penampilan | Arm Robot koléktif | 2020030683471.3 |
|
No. |
Judul penemuan |
Nomer Lamaran |
| 1 | Métode sareng sistem pikeun ngajaga sikep robot, nyéred, sareng ngajar | ZL 2018 1 1634649.3 |
| 2 | Métode deteksi tabrakan online robot sareng sistem dumasar kana modél moméntum | ZL 2019 1 0030748.9 |
| 3 | Hiji Jenis Robot Dinamis Parameter Métode Idéntifikasi bebas tina Joint Sudut Akselerasi | ZL 2019 1 0773865.4 |
Hardware
3.1 Controller jeung Actuator
3.1.1 M5STACK Dasar Utama Controller
M5STACK DASAR Kit, Sapertos namina, mangrupikeun kit starter diantara séri kit pamekaran M5STACK.
Ieu mangrupikeun alat modular, stackable, scalable, sareng portabel anu didamel ku inti ESP-32, anu ngajantenkeun open-source, béaya rendah, fungsi pinuh, sareng gampang pikeun pamekar pikeun nanganan pamekaran produk énggal dina sadaya s.tages kaasup desain sirkuit, desain PCB, software, desain kapang, jeung produksi. Kit Dasar ieu nyayogikeun harga anu ramah sareng sumber daya anu lengkep anu ngajantenkeun éta kit ngamimitian anu saé pikeun anjeun ngajalajah IoT.
Upami anjeun hoyong ngajalajah cara panggancangna prototyping IoT, papan pangembangan M5STACK mangrupikeun solusi anu sampurna. Henteu sapertos anu sanés, papan pangembangan M5STACK éfisién pisan, ditutupan ku pasualan kelas industri sareng papan pangembangan dumasar kana ESP32. Éta terpadu sareng modul Wi-Fi & Bluetooth sareng ngandung dual-core sareng 16MB SPI Flash. Kalayan 30+ modul stackable M5Stack, 40+ unit anu tiasa diperpanjang, sareng tingkat basa program anu béda, anjeun tiasa nyiptakeun sareng pariksa produk IoT anjeun dina waktos anu pondok.
Platform pangembangan anu ngadukung sareng basa pamrograman: Arduino, Basa Blocky sareng UIFlow, Micropython. Henteu paduli tingkat kaahlian pemrograman anu anjeun gaduh, M5STACK bakal ngabimbing anjeun dina unggal léngkah pikeun ngawujudkeun ide anjeun ogé kana produksi ahir. Upami anjeun kantos maén sareng ESP8266, anjeun bakal sadar yén ESP32 mangrupikeun pamutahiran anu sampurna tina ESP8266. Dina babandingan, ESP32 boga leuwih GPIOs, leuwih inputs analog, dua outputs analog, sababaraha périferal tambahan (kawas UART cadang). Platform ngembang resmi ESP-IDF parantos dicangkokkeun sareng FreeRTOS. Kalayan OS dual-core sareng real-time, anjeun tiasa nampi kode anu langkung teratur sareng prosesor anu gancang pisan.
M5STACK Dasar diwangun ku dua bagian anu tiasa dipisahkeun. Bagian tibalik ngagaduhan sagala jinis prosesor, chip, sareng sababaraha komponén slot anu sanés. stop kontak M-BUS, sarta pin extendable dina dua sisi.
3.1.1.1 Fitur Produk
- ESP32 basis
- Diwangun-di Speaker, Tombol, Warna LCD, Power / Reset tombol
- Slot kartu TF (ukuran maksimum 16G)
- Nyeuseup magnét di tukang
- Pin Extendable & liang
- M-Beus stop kontak & pin
- Platform Program: UIFlow, MicroPython, Arduino
3.1.1.2 Paraméter
| Sumberdaya | Parameter |
| ESP32-D0WDQ6 | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode Bluetooth |
| Kilat | 16 MB |
| Input kakuatan | 5V @ 500mA |
| Palabuhan | TypeC x 1, GROVE(I2C+I/0+UART) x 1 |
| Inti Bottom Port | PIN (G1,G2,G3,G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| Layar IPS | 2 inci, 320×240 LCD TFT Warna-warni, ILI9342C,Brightness853nit |
| Speaker | 1W-0928 |
| Tombol | Tombol custom x 3 |
| anteneu | 2.4G 3D anteneu |
| Suhu Operasi | 32°F nepi ka 104°F (0°C nepi ka 40°C) |
| Beurat bersih | 47.2g |
| Beurat kotor | 93g |
| Ukuran produk | 54 x 54 x 18 mm |
| Ukuran Paket | 95 x 65 x 25 mm |
| Bahan kasus | Plastik (PC) |
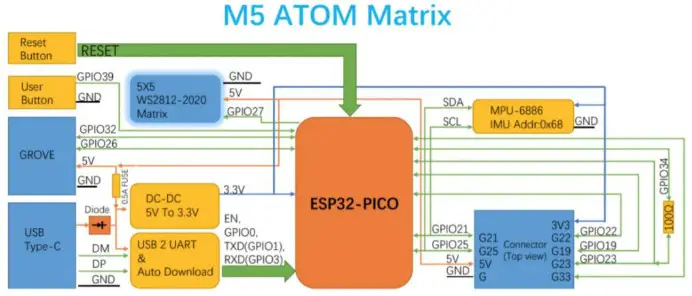
3.1.2 M5STACK Atom
ATOM Matrix, anu ngan ukur ukuran 24 * 24mm, mangrupikeun papan pangembangan anu paling kompak dina séri kit pangembangan M5Stack. Éta nyayogikeun langkung seueur pin GPIO sareng cocog pisan pikeun pamekaran alat anu dipasang sareng miniatur.
Kontrol utama ngadopsi chip ESP32-PICO-D4, anu terpadu sareng téknologi Wi-Fi sareng Bluetooth sareng gaduh 4MB mémori flash SPI terpadu. Papan Atom nyayogikeun LED Infra-Beureum sareng matriks LED 5 * 5 RGB dina panel, sénsor IMU anu diwangun (MPU6886), sareng antarmuka HY2.0. Tombol anu tiasa diprogram sacara umum disayogikeun di handap matriks RGB Led pikeun ngamungkinkeun para pangguna nambihan dukungan input kana sagala rupa proyékna. Antarbeungeut USB onboard (Tipe-C) ngamungkinkeun unggah sareng palaksanaan program gancang. Hiji liang screw M2 disadiakeun dina tonggong pikeun ningkatna dewan.
Catetan: Nalika nganggo manipulator, punten ulah ngaduruk firmware ka ATOM dina tungtung manipulator. Alat ukur ngadukung firmware asli urang.
Mangga bageur nawaran reureuh di ngartos kasulitan dibawa ka anjeun.
3.1.2.1 Fitur
- ESP32 basis PICO
- Tombol diprogram
- Panel matriks LED 5*5 RGB (WS2812C)
- Diwangun-di LED Infra-beureum
- Diwangun-di MPU6886 Sénsor inersia
- Pin Extendable & liang
- Platform Program: Arduino UIFlow
3.1.2.2 Spésifikasi
| Sumberdaya | Parameter |
| ESP32 | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode Bluetooth |
| Kilat | 4 MB |
| Input kakuatan | 5V @ 500mA |
| Palabuhan | TypeC x 1, GROVE(I2C+I/0+UART) x 1 |
| Panganteur PIN | G19, G21, G22, G23, G25, G33 |
| LED RGB | WS2812C 2020 x 25 |
| MEMS | MPU6886 |
| IR | Transmisi Infrabeureum |
| Tombol | Custom handap x 1 |
| anteneu | 2.4G 3D anteneu |
| Suhu Operasi | 32°F nepi ka 104°F (0°C nepi ka 40°C) |
| Beurat bersih | 3g |
| Beurat kotor | 14g |
| Ukuran produk | 24 x 24 x 14 mm |
| Ukuran pakét | 24 x 24 x 14 mm |
| Bahan kasus | Plastik (PC) |
3.1.3 Servo Motor
myCobot babagi 6 servo servo-kinerja tinggi dina 6 mendi kalawan advantagréspon gancang, inersia leutik, rotasi lancar, torsi stabil, jsb.
| Sumberdaya | Parameter |
| Ukuran | 23.2 * 12.1 * 28.5 mm |
| Input kakuatan | 4.8 ~ 7.4V |
| Suhu Operasi | -15~70° |
| torsi dipeunteun | 1.5kg.cm@6V |
| Torsi kios | 4.5kg.cm@6V |
| Sudut rotasi | 300°(Sudut tiasa diwatesan ku parangkat lunak) |
3.2 Struktur Mékanis
3.2.1 Ukuran jeung rentang gawé
A) mycobiota
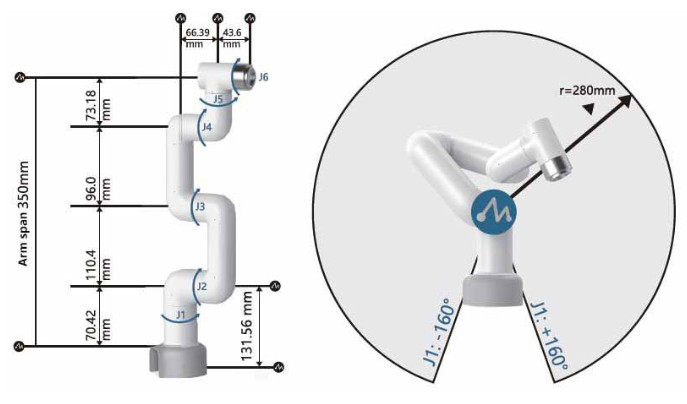
myCobot -Table of joint range of motion
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
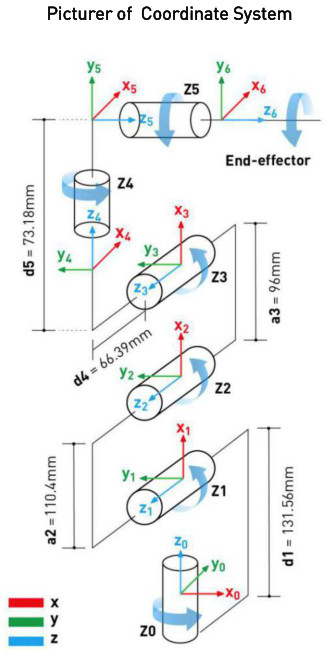
Picturer Sistim Koordinat
B) Majelis Dasar
Dasarna cocog sareng duanana liang komponén Lego-tech sareng liang screw ngaliwatan liang.
C)Tungtung Majelis
Tungtungna cocog sareng liang komponén Lego-tech sareng benang sekrup.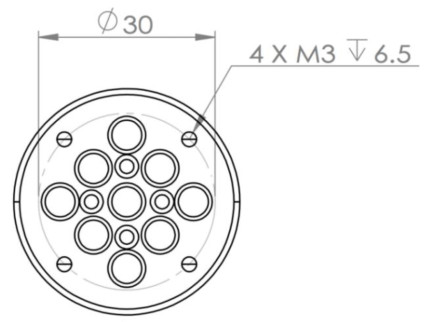
3.2.2 Unpacking jeung Instalasi
3.2.2.1 Ngabongkar bungkusan
Catetan: Saatos kotak bungkusan di tempat, mangga pastikeun yén bungkusan robot téh gembleng tur undamaged. Upami aya karusakan, mangga ngahubungi perusahaan logistik sareng supplier lokal dina waktosna. Saatos unpacking, mangga pariksa item nu sabenerna dina kotak nurutkeun daptar item.

| myCobot【set standar】 | -myCobot-280 - Brosur -Sasayogian tanaga -USB-Tipe C - Jumper -M4 * 35, screw stainless steel - Kunci sagi genep |
Mangga install sistem robot dina lingkungan nu meets kaayaan dijelaskeun dina tabel guna exert jeung mertahankeun kinerja mesin jeung make eta aman.
Lingkungan Operasi sareng Kaayaan
| Suhu | -10 ℃ ~ 45 ℃ |
| Kalembaban relatif | 20%~70% |
| Jero rohangan / Luar | jero rohangan |
| Sarat Lingkungan anu sanés | -Hindarkeun sinar panonpoé. - Jauhkeun tina lebu, haseup minyak, uyah, filing beusi, jsb. - Jauhkeun tina cairan sareng gas anu gampang kaduruk sareng korosif. - Ulah kontak jeung cai. - Teu ngirimkeun shock, geter, jsb. - Jauhkeun tina sumber gangguan éléktromagnétik anu kuat. |
3.2.2.2 Pamasangan
Beurat sabenerna robot kolaborasi mycobiota nyaéta 850g. Mertimbangkeun gerakan robot, puseur gravitasi bakal gerak salaku robot gerak. Ku alatan éta, robot perlu dibenerkeun dina dasar padet pikeun dipaké normal.
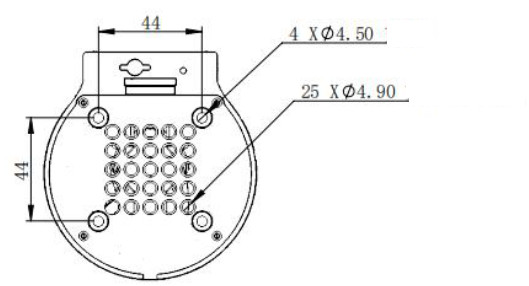
Ukuran antarmuka tina dasar robot: Liang panyambung alas nyaéta antarmuka anu ngalereskeun robot ka pangkalan atanapi pesawat sanés. ukuran liang husus ditémbongkeun saperti kieu. Éta 4 ngaliwatan liang kalayan diaméter 4.5mm, nu bisa dibenerkeun ku bolts M4.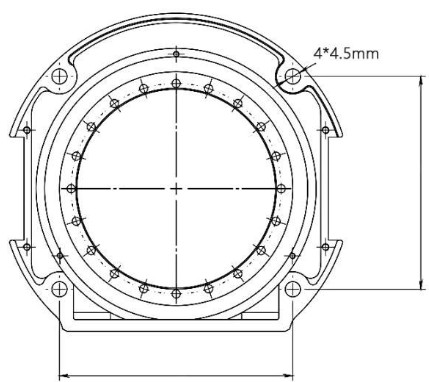
Pastikeun yén aya liang threaded saluyu dina dasar tetep saméméh masang. Sateuacan anjeun masang sacara resmi, mangga pastikeun:
- Lingkungan anu bakal dipasang saluyu sareng sarat di luhur.
- Posisi instalasi teu kirang ti rentang gawé tina robot, sarta aya cukup spasi
pikeun instalasi, pamakéan, pangropéa, sarta perbaikan. - Teundeun stand dina posisi ditangtoskeun.
- Alat anu aya hubunganana sareng pamasangan parantos siap, sapertos sekrup, rengkuh, jsb.
Saatos confirming di luhur, mindahkeun robot ka beungeut ningkatna tina dasarna, saluyukeun posisi robot, sarta align liang ngaropéa tina dasar robot jeung liang dina beungeut ningkatna tina dasarna.
Catetan: Nalika nyaluyukeun posisi robot dina dasar ningkatna, punten ulah ngadorong robot langsung dina beungeut ningkatna tina dasarna pikeun nyegah goresan. Nalika mindahkeun robot sacara manual, mangga cobian ulah nerapkeun gaya éksternal kana bagian lemah awak robot pikeun ngahindarkeun karuksakan anu teu perlu kana robot.
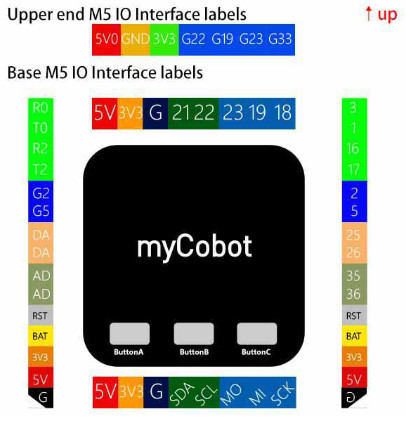
3.3 Éléktronik jeung Éléktronik
myCobot boga tilu terminal éksternal. Éta terminal éksternal M5Stack Dasar dina dasarna, dua terminal Grove deukeut stop kontak kakuatan sarta pin terminal éksternal tina gabungan M5Stack Atom J6.
a)M5STACK Diagram Listrik Dasar

b) Diagram Sirkuit Atom M5STACK
c)Io Interface Diagram
Parangkat lunak
Pikeun apdet parangkat lunak, mangga parios heula Github kami. https://github.com/elephantrobotics/myCobot
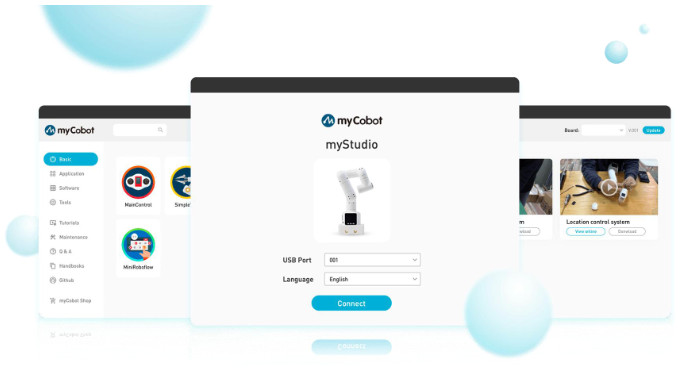
4.1 Ningkatkeun firmware sareng Pamulihan - studio kuring
studio abdi platform hiji-eureun pikeun robot robot abdi / mycobiota.
Fungsi utama studio kuring nyaéta: 1) Ngamutahirkeun firmware; 2) Nyadiakeun video tutorials ngeunaan cara ngagunakeun robot; 3) Nyadiakeun informasi pangropéa sarta perbaikan (sapertos video tutorials, Q&A, jsb).
Link kana pidéo youtube ngeunaan myStudio nyaéta: https://youtu.be/Kr9i62ZPf4w
Lamun perlu ningkatkeun atawa ngajaga mycobiota Anjeun, pastikeun yén lingkungan ngembangkeun geus nyetél. Upami henteu, punten pasang supir port serial heula teras cobian nganggo parangkat lunak. Link downloadna kieu:
Resmi websitus: https://www.elephantrobotics.com/myCobot/
Github: https://github.com/elephantrobotics/MyStudio/
Upami anjeun nganggo sistem Windows, mangga pilih "my studio-windows.exe" pikeun diunduh, teras unzip kana polder proyék anjeun. Kade ulah nganggo jalur anu rumit, anu tiasa nyababkeun masalah sareng jalur anu teu dikenal.
Upami lingkungan pangembangan anjeun tos disetél, anjeun tiasa langsung muka file "MyCobot. exe".
Saatos muka, antarmuka nyaéta kieu: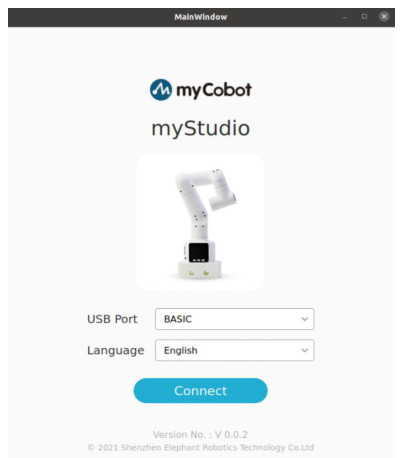
Sambungkeun myCobot anjeun sareng "Dasar" atanapi "Atom", pilih "Basa" teras klik "Sambungkeun" kanggo ngalebetkeun antarmuka utama anu dipidangkeun di handap ieu: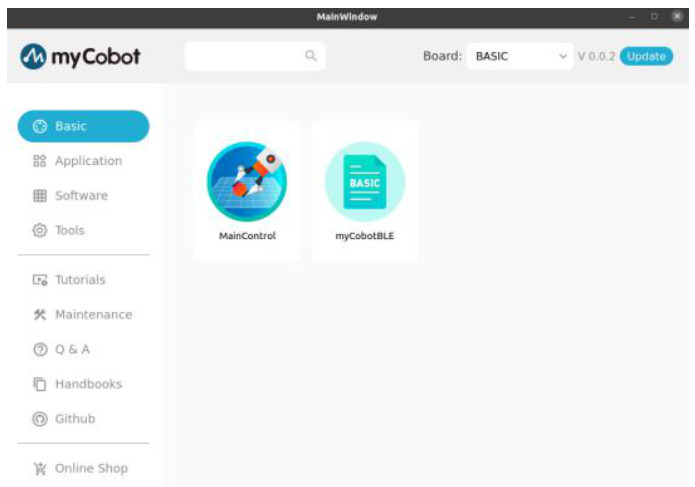
Lamun anjeun nyambung duanana Dasar sarta Atom, Pilih software nu Anjeun hoyong bakar deui dina Board bar di pojok katuhu luhur, lajeng klik Dasar atawa Alat pikeun milih firmware nu Anjeun hoyong bakar.
4.2 Diwangun-di Rekaman Lagu
M5STACK Dasar dewan kontrol utama boga 3 tombol ngarojong programming custom sarta tulisan data. Program ieu open source, anjeun tiasa pariksa kami GitHub.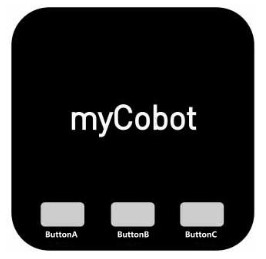
Démonstrasi Pangajaran Séred
- Rékam: Saatos asup kana modeu rékaman, pilih lokasi neundeun rékaman

Tombol A: Nyimpen ka Ram
Tombol B: Simpen kana Kartu Mémori
Tombol C: Kaluar tina Mode Rekaman - Mimitian Rékam

Saatos milih lokasi panyimpen, sered panangan robot sacara manual pikeun ngarengsekeun tindakan target, teras tindakan bakal dirékam sareng disimpen. - Maén

Tombol A: Mimitian Puter Peta nu dirékam
Tombol B: Reureuh
Tombol C: Kaluar Playback
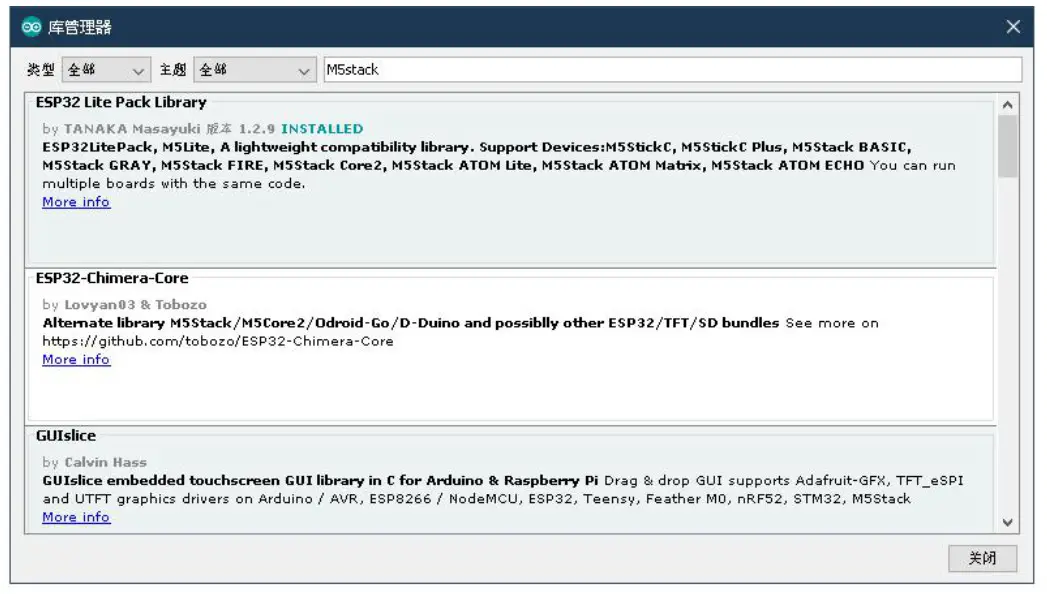
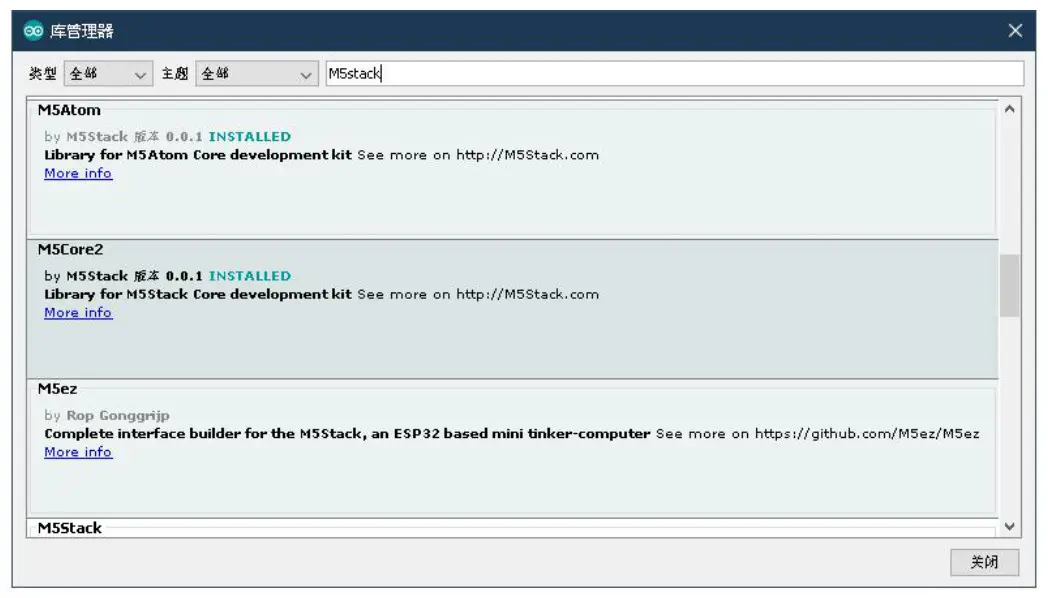
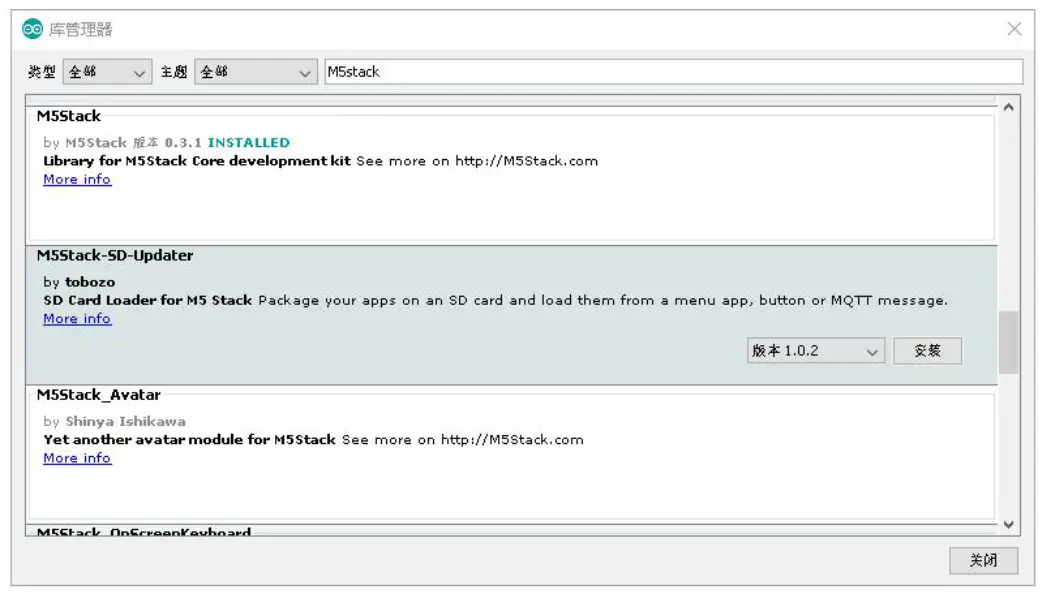
4.3 Perpustakaan Arduino
Perpustakaan mangrupikeun kumpulan kode anu ngamungkinkeun anjeun gampang nyambung sareng ngagunakeun sensor, tampilan, modul, jsb.ample, perpustakaan LiquidCrystal diwangun-di bisa ngawujudkeun komunikasi gampang jeung tampilan LCD karakter.
Fungsi dewan pamekaran Arduino tiasa dilegakeun nalika nganggo perpustakaan. Kusabab perpustakaan, urang bisa kalayan gampang ngawujudkeun kolaborasi antara Arduino jeung hardware éksternal atawa komunikasi data. Arduino IDE tos dipasang sareng séri perpustakaan standar files. Dina waktos anu sami, anjeun ogé tiasa masang sareng ngimpor perpustakaan pihak katilu (sapertos perpustakaan open-source anu diunduh tina Internét) kana Arduino IDE. Anjeun malah tiasa ngadamel perpustakaan sareng ngimpor kana Arduino IDE. Ayana perpustakaan mantuan pamaké pikeun bypass eusi leuwih husus kayaning registers na pointers alamat, greatly ngurangan kasusah pangwangunan. Upami anjeun peryogi terang kumaha nambihan perpustakaan pihak katilu pikeun pamasangan ARDUINO IDE, mangga tingal alamat sareng metode pamasangan supir: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development Anjeun ogé tiasa pariksa kami Github kanggo inpormasi anu langkung lengkep. https://github.com/elephantrobotics/myCobot
Anjeun ogé tiasa pariksa kami Github kanggo inpormasi anu langkung lengkep. https://github.com/elephantrobotics/myCobot
Sukamaha kieu:
4.4 API Interface jeung Komunikasi
- UNIFLOW
- Arduino
- micro python
- FreeROTS
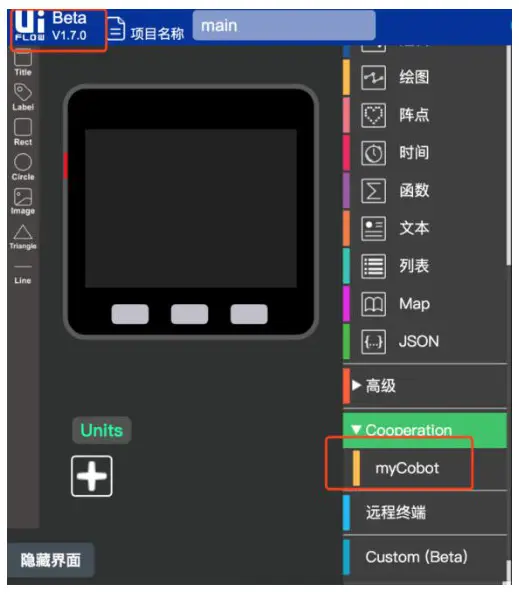
4.4.1 UIFlow
Anggo Vérsi Béta UIFlow sareng Pilih Kerjasama - mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
ROS nuju dikembangkeun sareng bakal diropéa dumasar kana kamajuan.
Dina 12.31:
- Ngamutahirkeun setelan ROS ku kituna Python2 atanapi 3 ayeuna tiasa dipasang.
- Ganti ku cara manual ngasupkeun port serial, jadi pamaké Windows bisa langsung ngajalankeun.
- Apdet dokumen spésifikasi Interface anyar dina Perpustakaan API, mangga tingali "README".
- 4.6 Kalibrasi gabungan
Lamun mobot Anjeun kudu calibrate mendi, mangga nganggo firmware of mycobiota atanapi Arduino sarta parabot lianna pikeun ngaduruk Calibration munggaran.
Saatos unggah firmware, antarmuka Dasar dipidangkeun di handap:
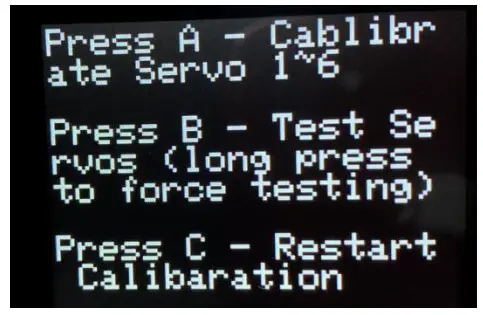
Dina waktos ieu, muterkeun J1 kana posisi enol baku aligning kalawan alur, sarta pencét tombol A (tombol kénca), lajeng J1 bakal balik ti gerak dinamis kana posisi statik sarta dibenerkeun kana posisi enol baku ieu.
Malikan deui léngkah-léngkah ieu pikeun nyetél sésa J2-J6. Saatos J6 disetel, pencét deui kenop A (konci kénca) pikeun nyimpen sadaya Setélan.
Nalika sakabéh mendi balik ka posisi nol baku, anjeun ogé kudu pariksa naha myCobot tiasa beroperasi normal. Pencét tombol B (tombol tengah), lajeng robot kuring bakal ngadeteksi J1 mun J6 dina urutan.
Punten pastikeun teu aya halangan atanapi gangguan tanaga dina kisaran operasi pikeun nyegah karusakan alat sareng personel salami tés.
Pemrograman Visual sareng Parangkat Lunak Industri
5.1 Visual Programming Software-UIFlow
Pikeun panggunaan anu lengkep, mangga kéngingkeun manual operasi Aliran UI tina tautan di handap.
Dasar M5STACK: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5STACK Atom: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 Industrial Visualisasi Programming Software-RoboFlow
myCobot ngadukung RoboFlow dioperasikeun ku robot kolaborasi industri Gajah Robotics. Prosés operasi RoboFlow basajan tur gampang ngagunakeun, sarta panganteur interaktif jelas tur gampang kaharti, nu merenah pikeun pamaké pikeun gancang ngawasaan tur ngagunakeun, sarta éféktif mantuan pamaké pikeun ngalengkepan operasi sarta tugas programming éfisién. Malah pamaké novice ogé bisa ngahontal fungsi target ngaliwatan operasi basajan.
Pikeun panggunaan anu lengkep, mangga kéngingkeun manual operasi RoboFlow tina tautan di handap ieu.
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
Saatos-jualan Service
- Palayanan mulang dugi ka barang anu henteu dibuka dina 7 dinten saatos tanggal nampi logistik produk. The angkutan barang atawa resiko sejenna ditanggung dina mulang bakal ditanggung ku nasabah.
- Konsumén kedah nyayogikeun invoice pameseran sareng kartu garansi salaku sertipikasi jaminan nalika aya jaminan dipénta.
- Gajah Robotics bakal nanggungjawaban kanggo kasalahan hardware produk disababkeun ku pamakéan normal salila periode jaminan.
- Mangsa jaminan dimimitian ti tanggal pameseran atanapi tanggal resi logistik.
- Bagian anu lepat tina produk bakal dipiboga ku Gajah Robotics, sareng biaya anu pas bakal ditagihkeun upami diperyogikeun.
Upami anjeun kedah ngalamar jasa garansi, mangga ngahubungi layanan palanggan kami heula pikeun mastikeun inpormasi anu lengkep. Ieu mangrupikeun syarat jaminan pikeun komponén lengkep:
Catetan: Upami aya konflik sareng Brosur Produk, Manual Pamaké anu bakal dianggo.
a) Sever motor
| Periode Garansi | Jasa Jaminan |
| ≤1 bulan | Elephant Robotics nawiskeun motor sever énggal gratis sareng nanggung angkutan. |
| 1-3 bulan | Robotika Gajah nawiskeun motor sever énggal gratis, pabean kedah nanggung angkutan |
| ≥3 bulan | Konsumén kudu meuli sorangan. |
b)Bahan Listrik(M5 Hardware)
| Periode Garansi | Jasa Jaminan |
| ≤3 bulan | Konsumén kudu ngintunkeun deui sanggeus disassembly, Gajah Robotics wajib ngirim nu anyar haratis tur nanggung angkutan kaluar jeung imah. |
| 3-6 bulan | Konsumén kedah ngintunkeun deui saatos dibongkar sareng nanggung angkutan barang sareng bumi, Gajah Robotics bakal ngirim nu anyar haratis. |
| ≥6 bulan | Konsumén kudu meuli sorangan. |
c)Bagian Struktur, kalebet Bagian Cangkang
| Periode Garansi | Jasa Jaminan |
| ≤1 taun | Gajah Robotics nawiskeun komponén anyar gratis sakali, adat wajib nanggung angkutan barang. |
| ≥1 taun | Konsumén kudu meuli sorangan. |
Salila période jaminan produk dikirimkeun, pausahaan ngan ngalereskeun nu malfunctions anu lumangsung salila pamakéan normal tina robot haratis. Nanging, dina kasus di handap ieu, palanggan bakal ditagihkeun pikeun perbaikan (sanaos salami periode garansi):
- Karusakan atanapi gangguan anu disababkeun ku pamakean anu salah sareng pamakean anu teu leres béda ti manual.
- Gagalna disababkeun ku disassembly diidinan ku nasabah.
- Karusakan disababkeun ku adjustment teu bener atawa perbaikan teu sah.
- Karusakan disababkeun ku bencana alam sapertos gempa bumi sareng banjir.
punten mastikeun turutan parentah dina manual ieu sareng manual patali pikeun beroperasi robot.
Tanya Jawab:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
Q: Kompiler teu tiasa mendakan alat anu saluyu?
A: alat nu bisa dimekarkeun ngan sanggeus nyetel lingkungan ngembangkeun sarta masang perpustakaan proyék pakait.
Q: The compiler teu bisa compile sampprogram le bener pikeun manggihan alat nu saluyu?
A: Perpustakaan proyék anu diperyogikeun henteu dipasang atanapi aya konflik sareng perpustakaan proyék. Punten parios yén perpustakaan proyék dipasang leres heula. Lamun geus dipasang leres ut masih teu bisa compile, mangga reinstall lingkungan ngembangkeun Arduino.
Q: Alat gagal fungsina leres saatos ngaduruk firmware ka ATOM?
A: Firmware pikeun terminal ATOM kedah nganggo firmware pabrik urang. Upami firmware sanésna kaduruk, anjeun tiasa milih"myCobot ATOM ATOMMAIN pikeun ngaduruk terminal ATOM.
Q: Aya guncangan sakedik dina posisi nangtung tapi henteu dina kaayaan gerak?
A: Mangga parios lamun robot abdi dina kaayaan nangtung. mycobiota teu kapangaruhan ku gravitasi dina kaayaan nangtung, voidage mékanis bisa ngabalukarkeun wobbles minor. Tapi moal aya wobbles nalika kaluar tina kaayaan nangtung. Laju anu disarankeun nyaéta 400-500 dina kaayaan nangtung.
Q: Naha sistem ROS bakal ngecas engké?
A: ROS nyaéta open source sareng bakal diropéa kana Github kami. Henteu aya biaya pikeun pamutahiran firmware.
Taros Kami
Upami anjeun peryogi bantosan, mangga ngahubungi kami anu dipidangkeun sapertos kieu.
Shenzhen Elephant Robotics Technology Co., Ltd
Alamat: B7, Yungu Innovative Industrial Park 2, Nanshan, Shenzhen, Cina
Surélék: support@elephantrobotics.com
Telepon: +86(0755)-8696-8565 (dinten damel 9:30-18:30)
Websitus: www.elephantrobotics.com
Twitter: CobotMy

Dokumén / Sumberdaya
 |
Robot Gajah MyCobot Genep-Axis Collaborative Robot Arm [pdf] Manual pamaké MyCobot, Panangan Robot Kolaboratif Genep Axis, Panangan Robot Kolaborasi Genep Axis MyCobot, V20210309 |



