Netzer Precision VLP-247 Aci kerung Rotary Encoder Kit Encoder
spésifikasi
- Resolusi sudut: 18-20 saeutik
- Akurasi posisi nominal: ± 0.006°
- Laju operasional maksimum: 4,000 rpm
- rentang pangukuran: Giliran tunggal, henteu terbatas
- arah rotasi: Adjustable CW/CCW*
- Diwangun-In Test BIT: Pilihan
- * Default arah sarua ti sisi handap encoder nu
Émbaran produk
VLP-247 Absolute Hollow Shaft Rotary Encoder Kit Encoder mangrupakeun encoder precision dirancang pikeun aplikasi lingkungan kasar. Dumasar kana téknologi kapasitif anu dikembangkeun ku Netzer Precision Position Sensors, encoder ieu diwangun pikeun nyumponan sarat tina aplikasi anu nungtut.
Parentah Pamakéan Produk
Pamasangan mékanis
Tingal bagian Pamasangan Mékanis dina manual pangguna pikeun pitunjuk lengkep ngeunaan masang encoder. Turutan tungtunan Pamasangan End-of-Shaft pikeun pamasangan anu leres.
Modeu Operasional
Encoder beroperasi dina modeu SSi / BiSS. Mangga tingal manual pamaké pikeun parentah husus dina ngonpigurasikeun jeung ngoperasikeun encoder dina modeu ieu.
FAQ
- Q: Naon laju operasional maksimum VLP-247 encoder?
A: Laju operasional maksimum encoder VLP-247 nyaéta 4,000 rpm. - Q: Sabaraha lami téknologi kapasitif dianggo dina VLP runtuyan geus dimekarkeun?
A: Téknologi kapasitif anu dianggo dina séri VLP parantos dikembangkeun sareng ditingkatkeun langkung ti 20 taun ku Netzer Precision Position Sensors.
VLP Encoders Bubuka
Dirancang pikeun minuhan sarat tina aplikasi paling nuntut
Runtuyan VLP of Electric Encoders™ mangrupakeun garis encoders dirancang pikeun aplikasi lingkungan kasar. Encoders ieu didasarkeun kana téknologi kapasitif anu parantos dikembangkeun sareng ditingkatkeun langkung ti 20 taun ku Netzer Precision Position Sensors.
Enkoder VLP dicirikeun ku fitur-fitur di handap ieu anu ngabédakeunana tina éncoder anu sanés:
- Pro lowfile
- Poros kerung (Stator/Rotor)
- Henteu aya bantalan atanapi elemen kontak anu sanés
- resolusi luhur sarta precision alus teuing
- Kekebalan kana médan magnét
- Toleransi luhur pikeun suhu ekstrim, shock, Uap, EMI, RFI
- beurat pisan low
- Generasi sinyal holistik sareng sensing
- Interfaces digital pikeun posisi mutlak
Struktur holistik VLP Electric Encoder™ ngajadikeun eta unik. Bacaan kaluaran mangrupikeun hasil rata-rata tina sakumna daérah kuriling rotor. Karakteristik desain alamiah ieu nyayogikeun encoder VLP kalayan akurasi anu luar biasa ogé pamasangan mékanis anu toleran. Henteuna komponén sapertos bantalan bola, gandeng fleksibel, cakram kaca, sumber cahaya & detéktor, sareng konsumsi daya anu rendah pisan, ngamungkinkeun para encoder VLP pikeun nganteurkeun kinerja anu ampir henteu gagal.
Spésifikasi teknis
Umum
| Resolusi sudut | 18-20 saeutik |
| Akurasi posisi nominal | ± 0.006° |
| Laju operasional maksimum | 4,000 rpm |
| Rentang pangukuran | Giliran tunggal, henteu terbatas |
| arah rotasi | Adjustable CW/CCW* |
| Diwangun Dina Test BIT | Pilihan |
* Default arah sarua ti sisi handap encoder nu
Mékanis
| Allowable ningkatna eccentricity | ± 0.1 mm |
| Allowable axial ningkatna kasabaran | ± 0.3 mm |
| Inersia rotor | 876,053 gr · mm2 |
| Total beurat | 220 gr |
| Luar Ø / Batin Ø / Jangkungna | 247/171/9 mm |
| Bahan (stator / rotor) | FR4 |
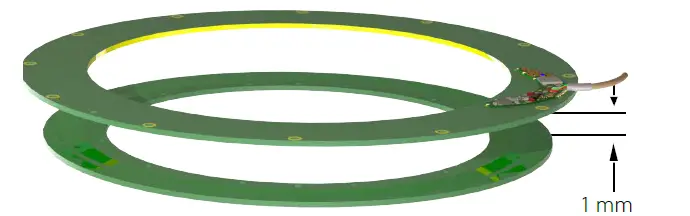
| Gap hawa nominal (stator, rotor) | 1 mm |
Listrik
| Pasokan voltage | 5V ± 5% |
| Konsumsi ayeuna | ~90 mA |
| Interkonéksi | Kabel (standar 250mm) |
| Komunikasi | SSi, BiSS-C |
| Kaluaran sérial | Diferensial RS-422 |
| Frékuénsi jam | 0.1-5.0 MHz |
| Laju update posisi | 35 kHz (Pilihan - nepi ka 375 kHz) |
Lingkungan
| EMC | IEC 6100-6-2, IEC 6100-6-4 |
| Suhu operasi | -40°C nepi ka +105°C |
| Suhu neundeun | -55°C nepi ka +125°C |
| Kalembaban relatif | 98% Non condensing |
| Daya tahan shock / fungsional | 100g 6msec saw-tooth per IEC 60068-2-27:2009 40g 11msec saw-tooth per MIL-810G |
| Geter fungsional | 7.7grms @ 20 nepi ka 2000 Hz per MIL-810G Kategori 24 |
| Panyalindungan | IP 40 |
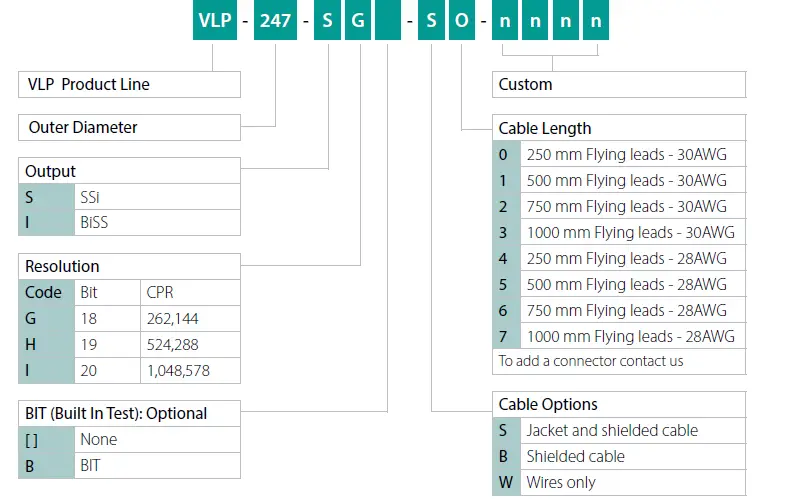
Kode pesenan
Gambar mékanis
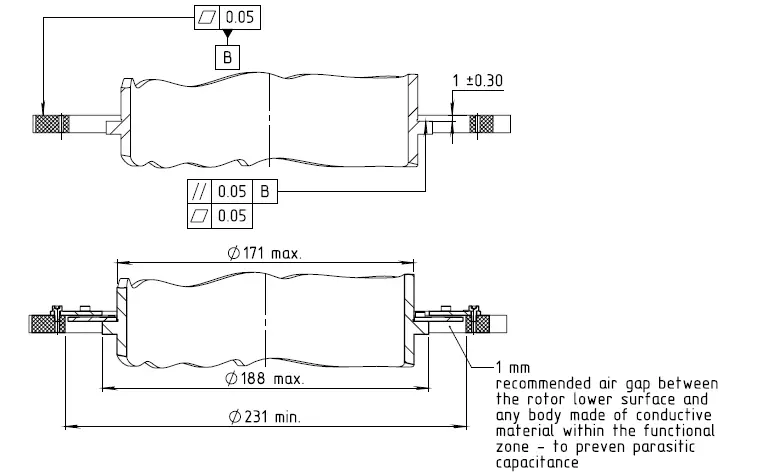
Iwal disebutkeun béda
- Diménsi aya dina: mm Surface finish: N6
Toleransi linier
- 0.5-4.9: ± 0.05 mm 5-30: ± 0.1 mm
- 31-120: ± 0.15 mm 121-400: ± 0.2 mm
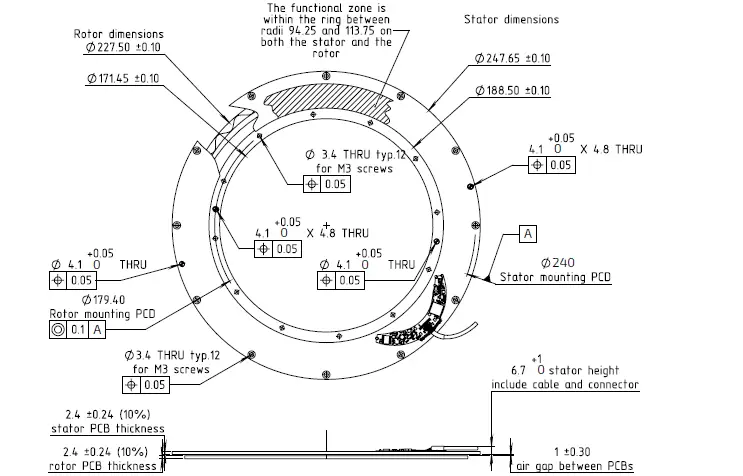
Mékanis Interface Control Gambar
Pilihan kabel
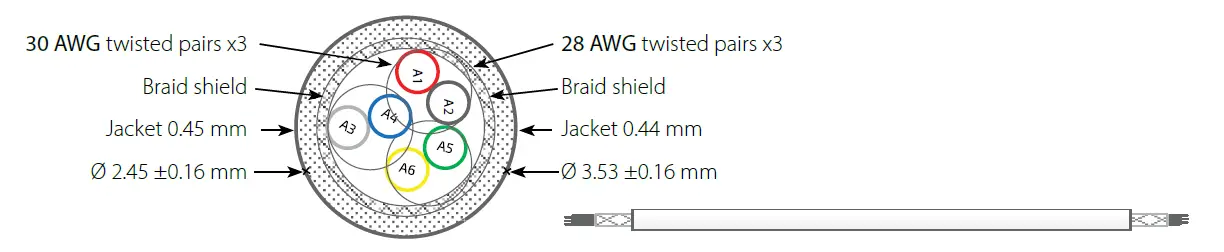
| Netzer Ucing No. | CB 00014 | CB 00034 |
| Tipe kabel | 30 AWG pasangan twisted x 3 | 28 AWG pasangan twisted x 3 |
| Jenis kawat | 2 x 30 AWG 25/44 insulasi tambaga kaleng: PFE Ø 0.15 OD: Ø 0.6 ± 0.05 mm |
2 x 30 AWG 40/44 insulasi tambaga kaleng: PFE Ø 0.12 OD: Ø 0.64 ± 0.05 mm |
| Temp. Peunteun | -55°C nepi ka +150°C | |
| Kepang tameng | Thinned tambaga braided 95% mnt. sinyalna | |
| Jaket | 0.45 karét silikon (NFA 11-A1) | 0.44 karét silikon (NFA 11-A1) |
| diaméterna | Ø 2.45 ± 0.16 mm | Ø 3.53 ± 0.16 mm |
Panyimpenan sarta Penanganan
- Suhu neundeun: -55°C nepi ka +125°C
- Kelembapan: Nepi ka 98% non-kondensasi
Perlindungan ESD
Saperti biasa pikeun sirkuit éléktronik, salila penanganan produk ulah noél sirkuit éléktronik, kawat, konektor atawa sensor tanpa panyalindungan ESD cocog. The integrator / operator wajib ngagunakeun parabot ESD pikeun nyegah résiko karuksakan sirkuit.
 PERHATOSAN PERHATOSAN PENCEGAHAN pikeun nanganan alat sénsitip éléktrostatik
PERHATOSAN PERHATOSAN PENCEGAHAN pikeun nanganan alat sénsitip éléktrostatik
Produk Leuwihview
Leuwihview
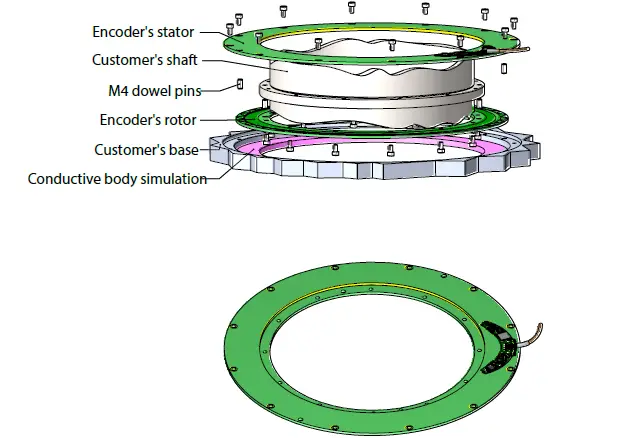
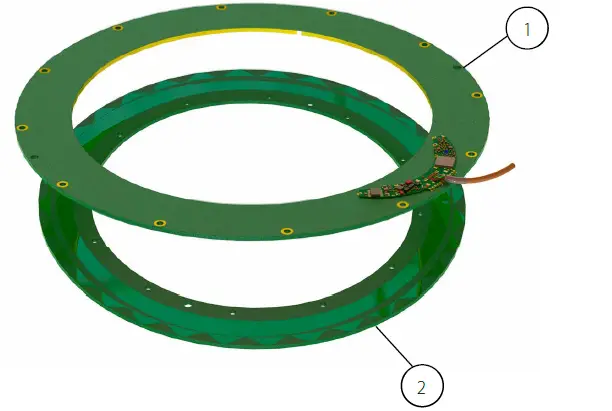
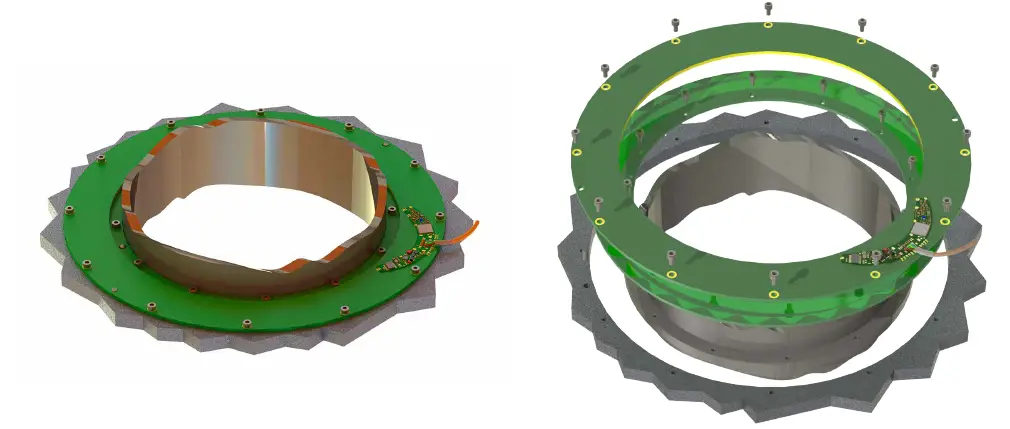
Posisi mutlak VLP-247 Electric Encoder ™ nyaéta sénsor posisi puteran anu dikembangkeun pikeun nungtut aplikasi. Ayeuna éta ngalaksanakeun dina sajumlah ageung aplikasi, kalebet pertahanan, kaamanan tanah air, robotika médis sareng otomatisasi industri. Téknologi non-kontak Electric Encoder™ nyadiakeun pangukuran posisi anu akurat ngaliwatan modulasi médan listrik. VLP-247 Electric Encoder™ mangrupikeun kit-encoder, nyaéta, rotor sareng statorna misah.
- Encoder stator
- Encoder rotor
Unpacking - urutan baku
Paket standar VLP-247 ngandung encoder Stator & Rotor.
asesoris pilihan:
- CNV-0003, RS-422 kana konverter USB (kalayan jalur catu daya 5V internal USB).
- NanoMIC-KIT-01, RS-422 kana converter USB. Modeu Setup & Operasional via antarmuka SSi / BiSS.
- RJ VLP-247 puteran jig
- DKIT-VLP-247-SG-S0, dipasang SSi encoder on Rotary jig, RS-422 mun USB converter jeung kabel.
- DKIT-VLP-247-IG-S0, dipasang BiSS encoder on Rotary jig, RS-422 mun USB converter jeung kabel.
Bagan alur pamasangan
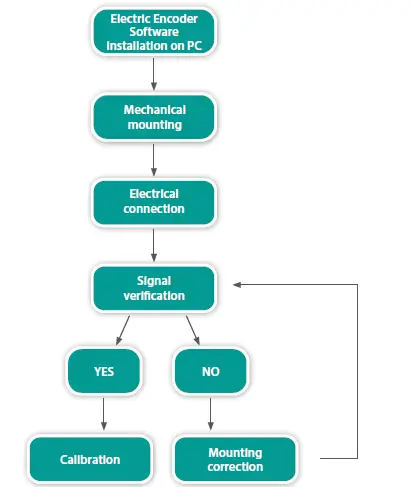
Pamasangan Software Encoder Listrik
Parangkat lunak Electric Encoder Explorer (EEE):
- Verifies leres ningkatna pikeun sinyal nyukupan amplituit
- Calibration of offsets
- Setélan umum sareng analisa sinyal
Bagian ieu ngajelaskeun léngkah-léngkah anu aya hubunganana sareng masang aplikasi parangkat lunak EEE.
syarat minimum
- Sistem operasi: MS windows 7/10, (32/64 bit)
- Mémori: 4 MB minimum
- Port komunikasi: USB 2
- Windows .NET Framework, minimum V4
Masang parangkat lunak
- Jalankeun Electric Encoder™ Explorer file kapanggih dina Netzer websitus: Encoder Explorer Parabot Software
- Saatos instalasi anjeun bakal ningali ikon software Electric Encoder Explorer dina desktop komputer.
- Klik dina ikon software Electric Encoder Explorer pikeun ngamimitian.
Pamasangan mékanis
Encoder ningkatna - End-of-Shaft Instalasi
Pamakéan instalasi encoder has
- screws Pamasangan Socket Head Cup Screw 12xM2, 6 unggal per stator & rotor.
- Pin dowel dipasang 4xØ2, 2 unggal per stator & rotor (teu kaasup jeung encoder).
Encoder stator / posisi relatif rotor
Pikeun kinerja ditangtoskeun celah hawa kudu 1 mm ± 0.3 mm
Dina ningkatna optimal, sinyal ampnilai litude dihasilkeun ku encoder nu, bakal jadi di tengah rentang plot sinyal ditémbongkeun dina software Encoder Explorer (tingali plot handap). Ieu bisa rupa-rupa nurutkeun jenis encoder. Pariksa pamasangan rotor anu leres sareng alat Encoder Explorer "Signal analyzer" atanapi "Proses verifikasi sinyal."
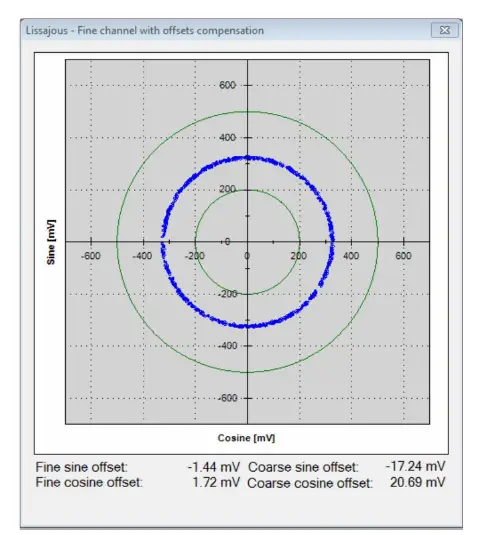
Catetan: kanggo inpormasi anu langkung lengkep mangga baca bagian 7
Sambungan Listrik
Bab ieu ulangviews léngkah diperlukeun pikeun listrik nyambungkeun encoder kalawan panganteur digital (SSi atanapi BiSS-C).
Nyambungkeun encoder
Encoder gaduh dua modeu operasional:
Posisi mutlak leuwih SSi atanapi BiSS-C
Ieu mangrupikeun modeu standar kakuatan-up
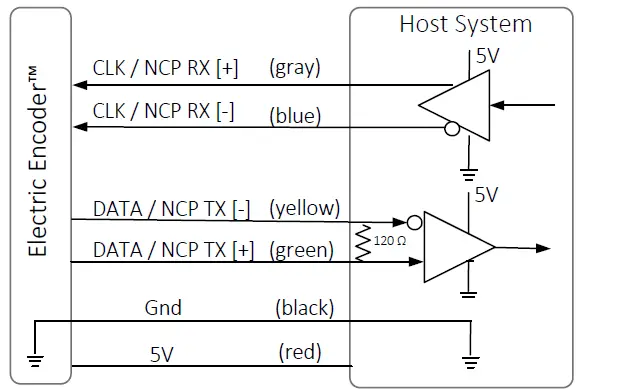
Kode warna kabel antarmuka SSi / BiSS
| Jam + | kulawu | Jam |
| Jam - | Biru | |
| Data- | Konéng | Data |
| Data + | Héjo | |
| GND | Hideung | taneuh |
| +5V | Beureum | Sasayogian tanaga |
Parameter sinyal kaluaran SSi / BiSS
| Kode kaluaran | binér |
| Kaluaran sérial | Diferensial RS-422 |
| Jam | Diferensial RS-422 |
| Frékuénsi jam | 0.1- 5.0 MHz |
| Laju update posisi | 35 kHz (Pilihan - nepi ka 375 kHz) |
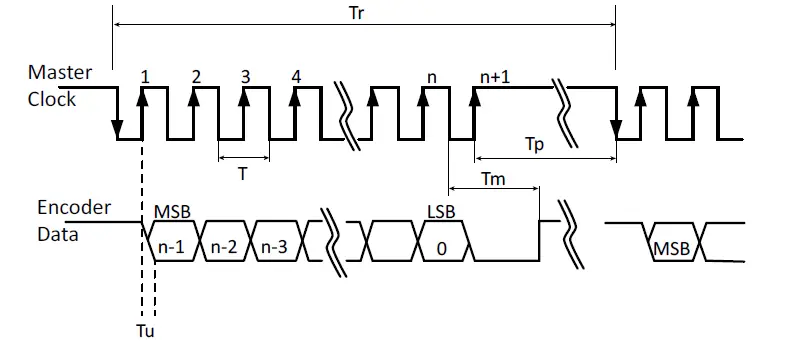
Digital SSi Interface
Sinkron Serial Interface (SSi) mangrupakeun titik ka titik standar panganteur serial antara master a (Contona controller) jeung budak (Contona sensor) pikeun pangiriman data digital.
Pilihan Tes Diwangun (BIT)
BIT nunjukkeun abnormalitas kritis dina sinyal internal encoder.
'0' - sinyal internal aya dina wates normal, '1' - Kasalahan
Jumlah Bagian tina encoder nunjukkeun naha encoder kalebet BIT. Mun euweuh BIT dituduhkeun dina PN, euweuh bit kasalahan tambahan.
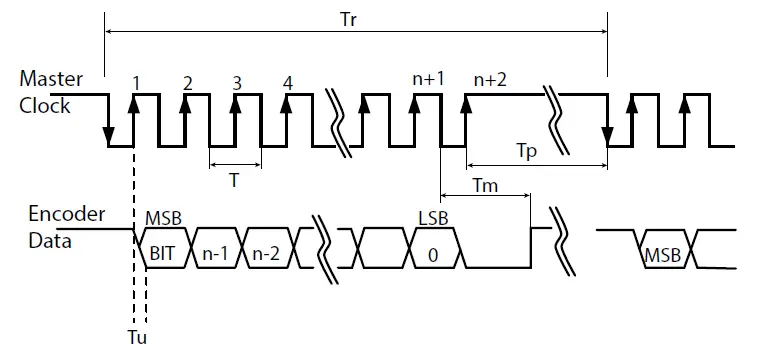
| Katerangan | Rekomendasi | |
| n | Resolusi posisi | 12-20 |
| T | jaman jam | |
| f= 1/T | Frékuénsi jam | 0.1-5.0 MHz |
| Tu | waktos update bit | 90 jsb |
| Tp | Ngareureuhkeun waktos | 26 – ∞ μs |
| Tm | waktos Monoflop | 25 μs |
| Tr | Waktos antara 2 pamundut padeukeut | Tr > n*T+26 μs |
| fr=1/Tr | Frékuénsi pamundut data |
Panganteur Digital BiSS-C
BiSS - C Interface nyaéta protokol sinkron serial unidirectional pikeun pangiriman data digital dimana Encoder tindakan minangka "budak" ngirimkeun data nurutkeun jam "Master". Protokol BiSS dirancang dina modeu B sareng modeu C (mode kontinyu). Antarbeungeut BiSS-C salaku SSi dumasar kana standar RS-422.
Pilihan Tes Diwangun (BIT)
BIT nunjukkeun abnormalitas kritis dina sinyal internal encoder.
'1' - sinyal internal aya dina wates normal, '0' - Kasalahan
Jumlah Bagian tina encoder nunjukkeun naha encoder kalebet BIT. Lamun euweuh BIT dituduhkeun dina PN, bit kasalahan salawasna 1.
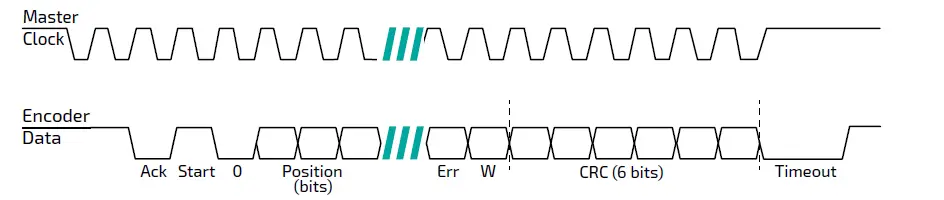
| Alokasi bit per encoder-resolusi | Katerangan Default | Panjangna | |||||
| 17 bit | 18 bit | 19 bit | 20 bit | ||||
| 27 | 28 | 29 | 30 | Ack | Periode salila encoder ngitung posisi mutlak, hiji siklus jam | 0 | 1 / jam |
| 26 | 27 | 28 | 29 | Mimitian | Sinyal encoder pikeun ngirimkeun data "mimitian". | 1 | 1 bit |
| 25 | 26 | 27 | 28 | "0" | "Mimitian" pengikut bit | 0 | 1 bit |
| 8…24 | 8…25 | 8…26 | 8…27 | AP | Data encoder Posisi Absolute | Per resolusi | |
| 7 | 7 | 7 | 7 | Kasalahan | BIT (Pilihan Uji Diwangun-di) | 1 | 1 bit |
| 6 | 6 | 6 | 6 | ngingetkeun. | Awas (non aktif) | 1 | 1 bit |
| 0…5 | 0…5 | 0…5 | 0…5 | CRC | Polinomial CRC pikeun posisi, kasalahan sareng data peringatan nyaéta: x6 + x1 + x0. Ieu dikirimkeun MSB munggaran tur inverted. Bit mimiti sareng bit "0" dileungitkeun tina itungan CRC. | 6 bitu | |
| Séép waktos | Elapse antara sequential "mimitian" siklus pamundut urang | 25 μs | |||||
Modeu setelan dina NCP (Netzer Communication Protocol)
Modeu layanan ieu nyadiakeun aksés via USB ka PC nu ngajalankeun aplikasi Netzer Encoder Explorer (dina MS Windows 7/10). Komunikasi ngaliwatan Netzer Communication Protocol (NCP) ngaliwatan RS-422 ngagunakeun set kawat anu sarua. Paké ngerjakeun pin handap pikeun nyambungkeun encoder ka 9-pin konektor D-tipe ka RS-422 / USB converter CNV-0003 atanapi NanoMIC.
panganteur encoder listrik, D Tipe 9 pin bikang
| Katerangan | Warna | Fungsi | Pin teu |
| Jam SSi / NCP RX | kulawu | Jam / RX + | 2 |
| Biru | Jam / RX - | 1 | |
| Data SSi / NCP TX | Konéng | Data / TX – | 4 |
| Héjo | Data / TX + | 3 | |
| taneuh | Hideung | GND | 5 |
| Sasayogian tanaga | Beureum | +5V | 8 |
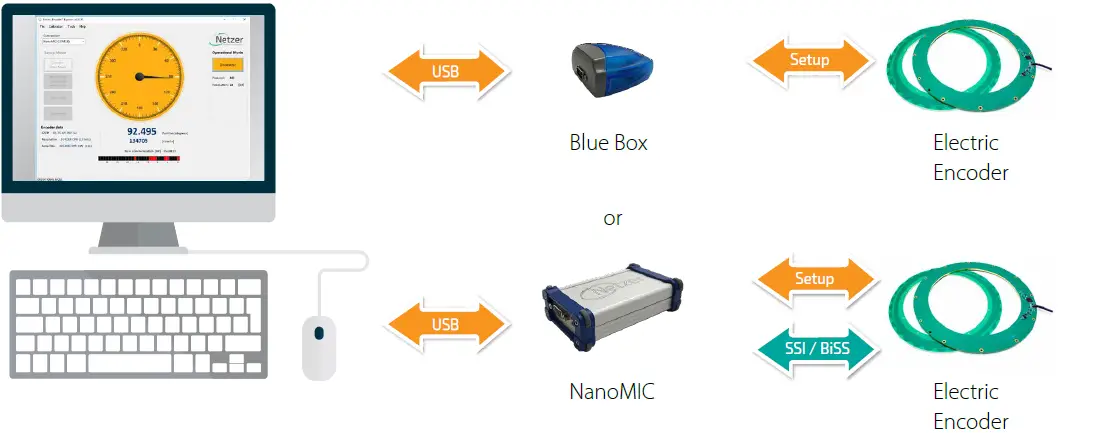
Sambungkeun encoder Netzer ka konverter, sambungkeun konverter kana komputer sareng jalankeun Alat Perangkat Lunak Encoder Listrik Explorer.
Sambungan listrik sareng grounding
Perhatikeun pertimbangan grounding di handap ieu:
- Tameng kabel ngambang sacara listrik (teu nyambung) sacara standar.
- Disarankeun pisan pikeun ngajaga kabel PWM motor ditangtayungan sareng / atanapi dijauhkeun tina encoder.
Catetan: 4.75 ka 5.25 VDC catu daya diperlukeun
Verifikasi sinyal
Ngamimitian Encoder Explorer
Pastikeun pikeun ngarengsekeun tugas di handap ieu suksés:
- Pamasangan mékanis
- Sambungan listrik ka encoder
- Encoder Ngajalajah Instalasi Software
Jalankeun alat Encoder Explorer (EE)
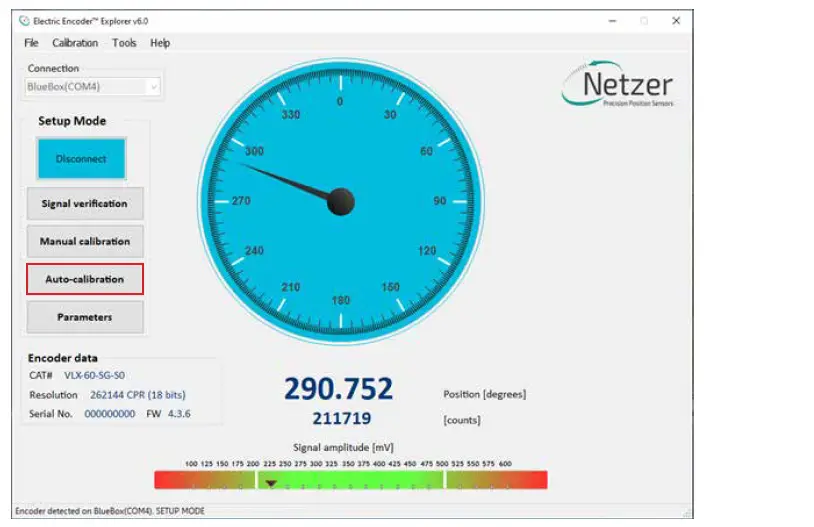
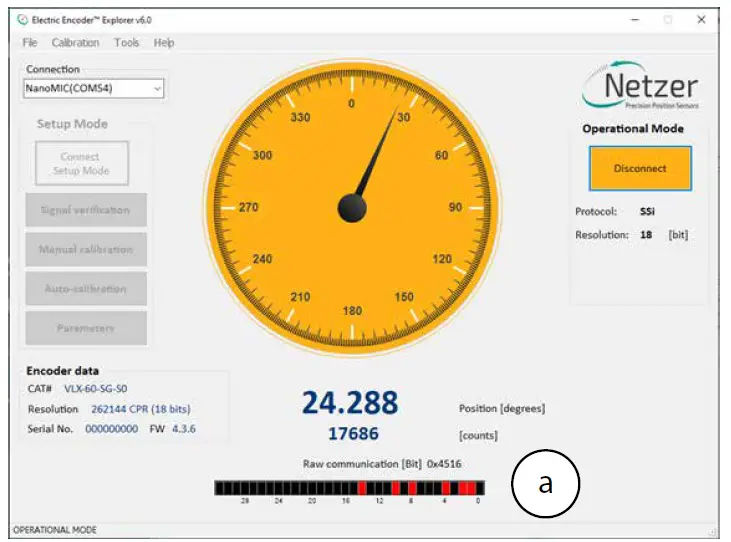
Pastikeun komunikasi anu leres sareng encoder: (Setélan mode sacara standar). Posisi-dial Encoder diwarnaan biru nalika dina Modeu Setup, boh ngaliwatan NanoMic atanapi BlueBox (a). Catet yén mode operasional teu sadia ngaliwatan BlueBox (b). Sinyal ampbar litude nunjukkeun naha sinyal aya dina kasabaran nu bisa ditarima (c). Catet yén sateuacan ngalaksanakeun prosés Verifikasi Sinyal bar tiasa nunjukkeun sinyal kaluar tina kasabaran (d). Data encoder dipintonkeun dina aréa data encoder (CAT No., Serial No.) (e). Tampilan dial posisi ngabales rotasi aci (f).
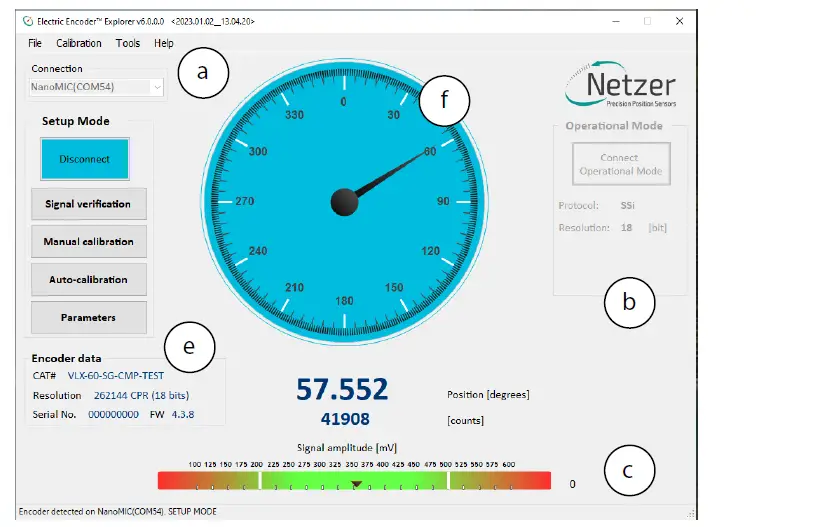

Penting pikeun ngalaksanakeun prosés Verifikasi Sinyal sateuacan kalibrasi encoder pikeun mastikeun kinerja anu optimal.
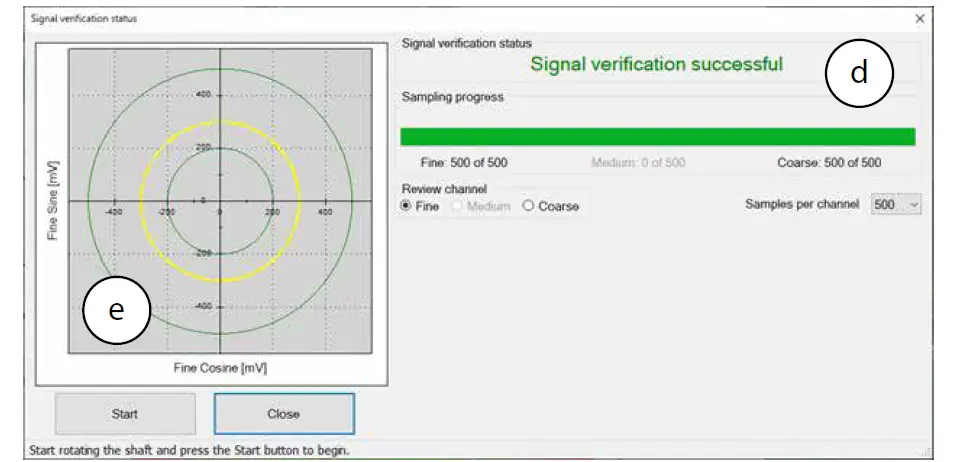
Prosés verifikasi sinyal
Prosés Verifikasi Sinyal mastikeun yén encoder dipasang leres sareng nyayogikeun sinyal anu saé amplitudes. Hal ieu dilakukeun ku cara ngumpulkeun data atah saluran halus sareng kasar salami rotasi.
- Pilih dina layar utama (a).
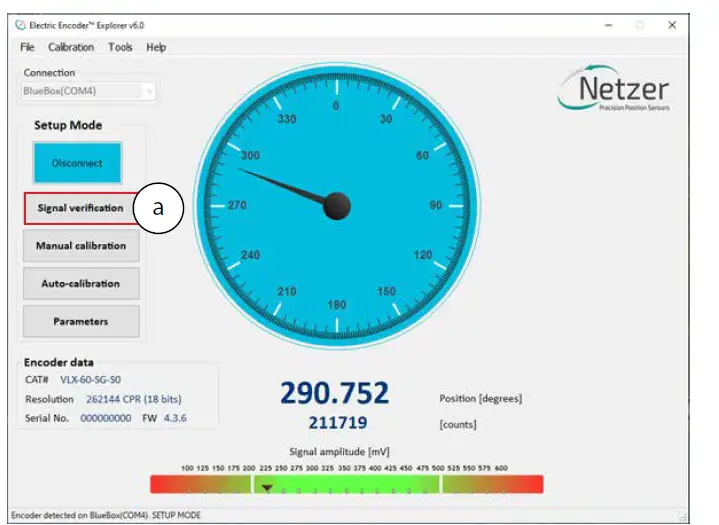
- Pilih pikeun ngamimitian prosés (b).
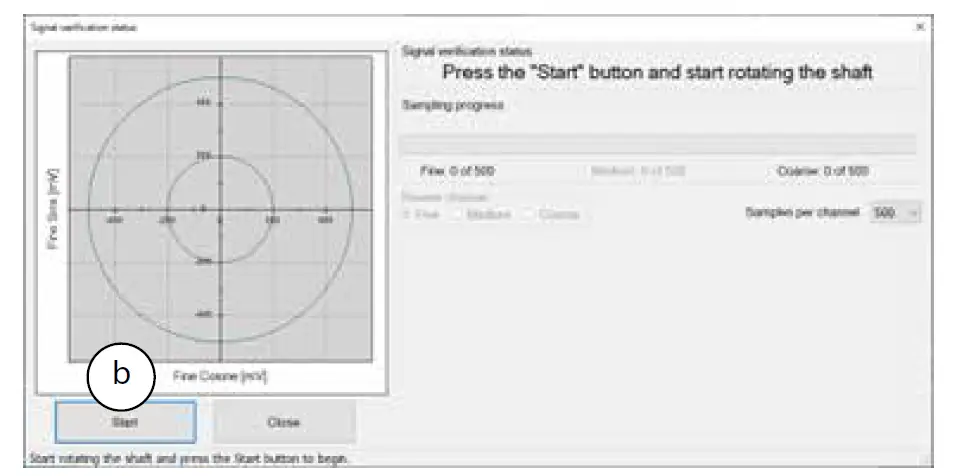
- Puterkeun aci pikeun ngumpulkeun data saluran halus sareng kasar (c).

Upami prosésna suksés, status "Vérifikasi sinyal suksés" bakal muncul (d). The 'ampbunderan litude 'bakal dipuseurkeun antara dua bunderan héjo, preferably di tengah toleransi (e).
Catetan kumaha oge, nu masang encoder nuju tolerances mékanis ekstrim bisa ngabalukarkeun ampbunderan litude bakal offset ti tengah pasti tina posisi nominal. Upami sinyalna kaluar tina kasabaran, béwara Kasalahan "Amplitude leuwih handap/leuwih luhur ti wates min/max XXX” bakal muncul (g). Salaku tambahan, status "Verifikasi sinyal gagal - ngalaksanakeun kalibrasi amplitude" bakal muncul di luhur (h).
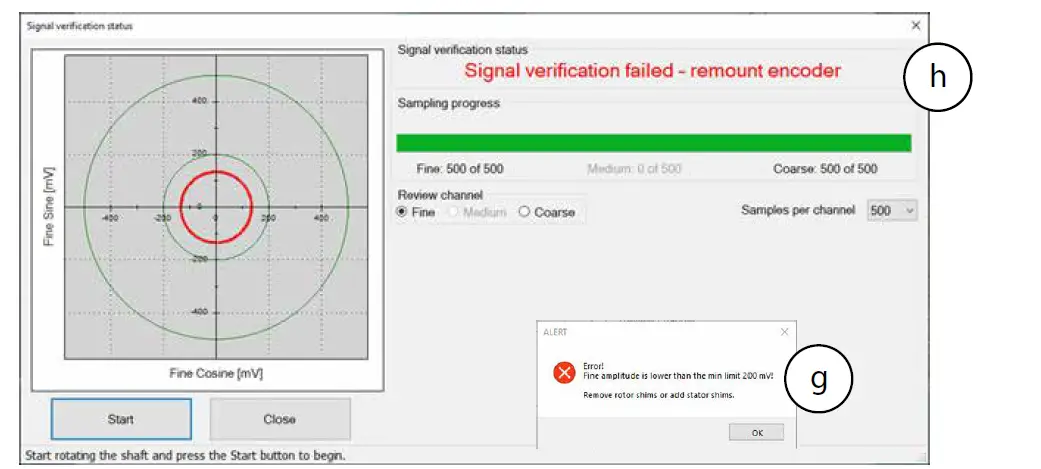
- Ngeureunkeun prosés jeung ulang Gunung encoder nu, mastikeun yén tolerances instalasi mékanis teu ngaleuwihan, nyoplokkeun atanapi nambahkeun shims sakumaha diperlukeun.
- Malikan deui prosés Verifikasi Sinyal saatos dipasang deui.
Saatos prosés verifikasi sinyal parantos réngsé, teraskeun kana fase kalibrasi encoder, Bagian 13
Kalibrasi
Kadé dina unggal pamasangan encoder, prosés Verifikasi Sinyal réngsé sateuacan nyobian calibration of encoder. Pikeun encoders kalawan FW 4 versi 4.1.3 atawa saluhureuna, kasebut nyaéta dimungkinkeun pikeun milih boh prosés calibration pinuh otomatis, atawa prosés calibration fase-demi-fase manual.
Kalibrasi otomatis
Calibration Otomatis dirojong ku encoders kalawan FW 4 versi 4.1.3 atawa saluhureuna. Pikeun encoders ieu tombol "Otomatis-calibration" ditampilkeun.
Prosés otomatis-calibration
Prosés Otomatis-calibration diwangun ku tilu stages:
- Uji Jitter - ngevaluasi sora listrik pikeun saluran encoder Halus, Sedeng, sareng Kasar. Salila tés jitter, aci kudu cicing.
Perhatosan! Kriteria Pass / Gagal tina uji Jitter dumasar kana kriteria pabrik anu ketat pisan sareng gagal éta bakal ngabatalkeun prosés Kalibrasi Otomatis.
Tapi, tes Jitter manual salaku bagian tina prosés Calibration Manual dina bagian 13.4, bakal ngamungkinkeun pamaké pikeun mutuskeun jitter téh bisa ditarima keur kaperluan na. - Calibration offset - ngalaksanakeun calibration offset, aci kudu muterkeun terus.
- Kalibrasi Posisi Absolute (AP) - ngalaksanakeun Kasar Amplitude Alignment (CAA) jeung Medium Amplitude Alignment (MAA) diitung.
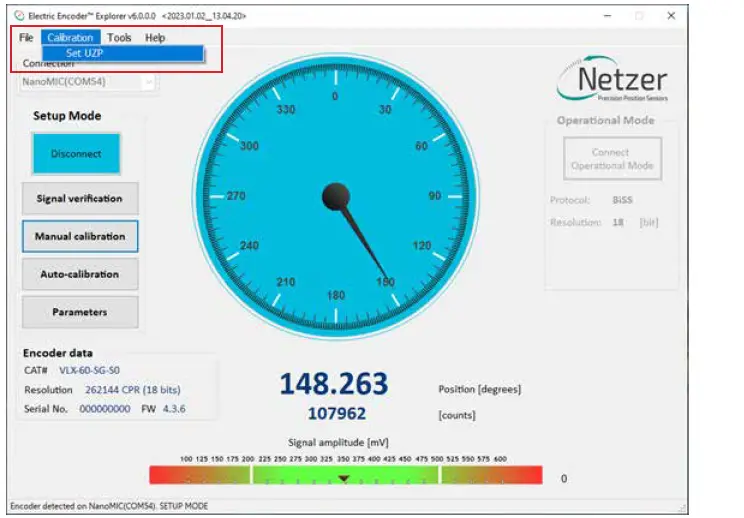
Salila prosés Otomatis-Calibration encoder urang Zero-Posisi tetep dina standar pabrik posisi enol pikeun encoders anyar. Kasebut nyaéta dimungkinkeun pikeun ngeset Zero Point ngaliwatan menu bar luhur, ku milih tab "Calibration", sarta ngaklik "Set UZP" sakumaha didefinisikeun dina bagian 13.3.
Ngajalankeun Otomatis-calibration
Pencét tombol .
Jandéla kalibrasi otomatis utama muka.
- Pilih rentang pangukuran anu cocog pikeun aplikasi anjeun (a).
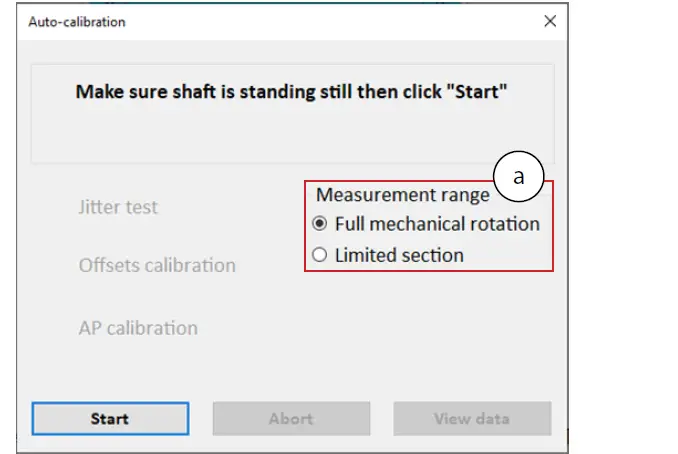
- Pastikeun tetep aci tetep terus pencét tombol
Tes Noise bakal dilakukeun sareng saatos parantos suksés labél "Tes Noise" bakal ditandaan ku tanda centang héjo. Kalibrasi Offset bakal otomatis dimimitian saatos tés Noise parantos réngsé. calibration Ieu merlukeun aci nu diputer terus. Kalibrasi AP bakal otomatis dimimitian saatos parantosan Kalibrasi Akurasi. Nuluykeun puteran aci dina fase ieu nepi ka calibration AP geus réngsé, sarta encoder reset. Saatos reset réngsé, prosés calibration Otomatis parantos réngsé.
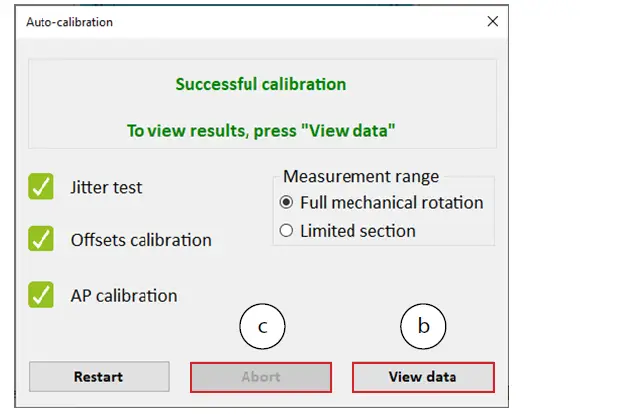
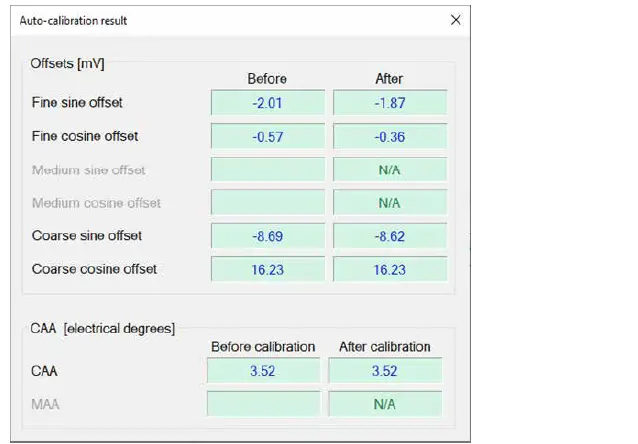
pamaké éta bisa ulangview hasil calibration ku ngaklik dinaView data> tombol (b).
Sok tiasa ngabatalkeun prosés Kalibrasi Otomatis ku ngaklik tombol tombol (c).
Gagal kalibrasi otomatis
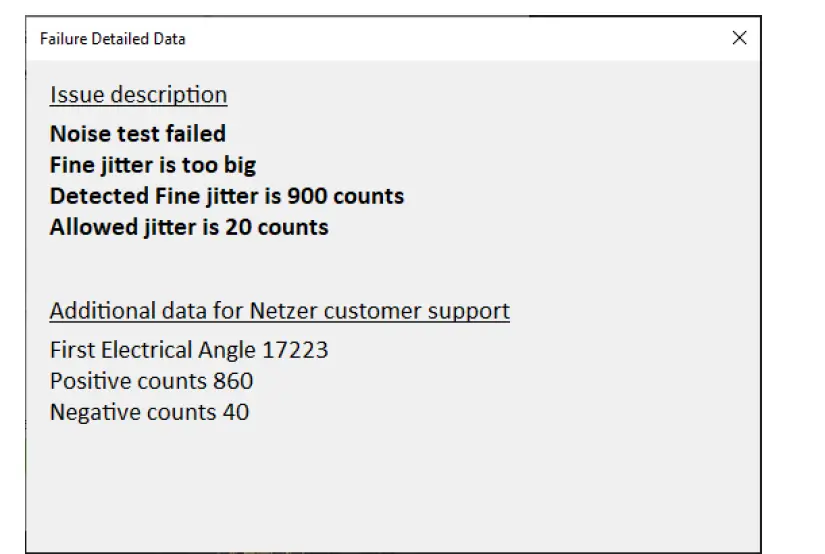
Upami tés gagal (contonaamptes Noise) - hasilna bakal ditandaan ku X beureum.
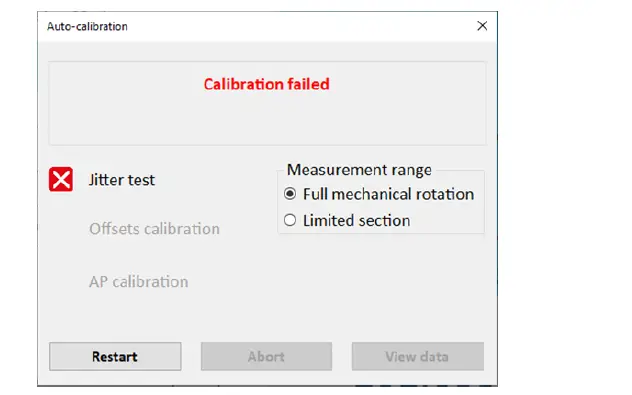
Upami prosés kalibrasi gagal, saran koréksi bakal ditingalikeun, pakait sareng unsur anu gagal dina tés.
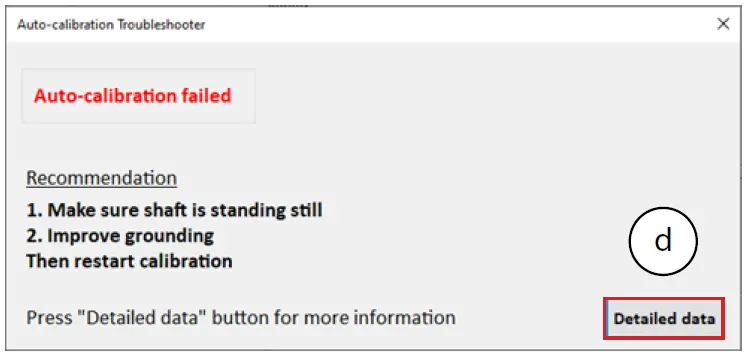
Kasebut nyaéta dimungkinkeun pikeun ulangview inpo wincik ngeunaan gagalna, ku ngaklik dina tombol (d).
Nyetél posisi enol tina encoder
- Pilih salah sahiji pilihan pikeun netepkeun titik enol teras klik .
Kasebut nyaéta dimungkinkeun pikeun nyetél boh posisi ayeuna atawa muterkeun aci ka sagala posisi séjén pikeun diatur salaku titik enol.

Ieu oge mungkin pikeun ngeset Zero Point ngaliwatan menu bar luhur, ku milih tab "Calibration", sarta ngaklik "Set UZP".
Tes jitter
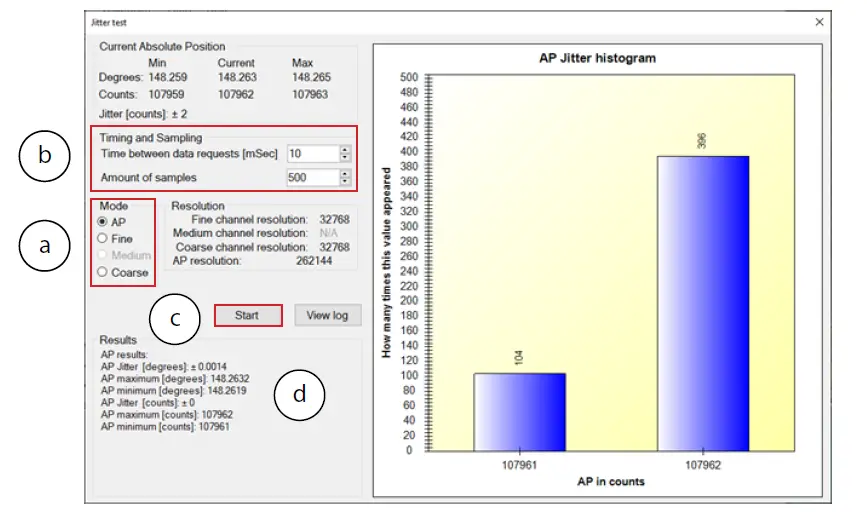
Tes jitter digunakeun pikeun ngevaluasi tingkat bising listrik. Jitter umum kudu nepi +/- 3 cacah; jitter luhur bisa nunjukkeun noise sistem sarta bakal merlukeun grounding hadé atawa shielding sahiji sumber noise listrik.
- Pilih tab "Calibration", teras klik "Jitter Test"

- Pilih modeu uji Jitter (a).
- Setel Timing sareng Sampparameter ling (b).
- Pencét tombol (c) jeung pariksa lamun hasilna (d) aya dina tolerances ditarima pikeun aplikasi dimaksudkeun.
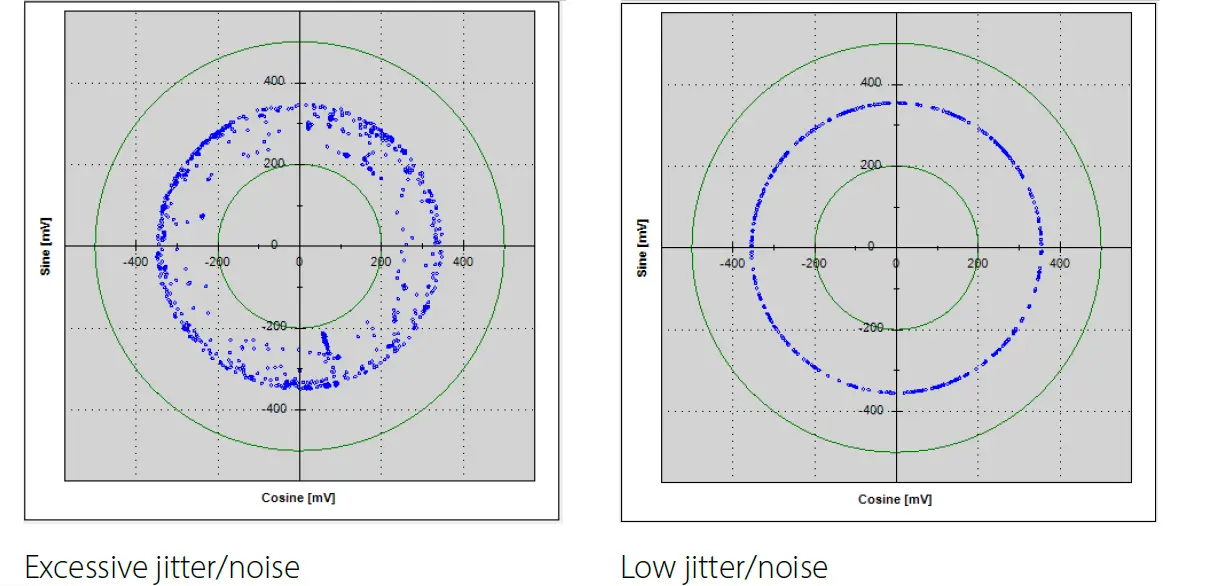
indikasi sejen tina jitter kaleuleuwihan / noise nalika titik-titik biru dina sinyal ampbunderan litude teu merata disebarkeun dina bunderan ipis sakumaha nembongan di handap.
Modeu Operasional
SSi / BiSS
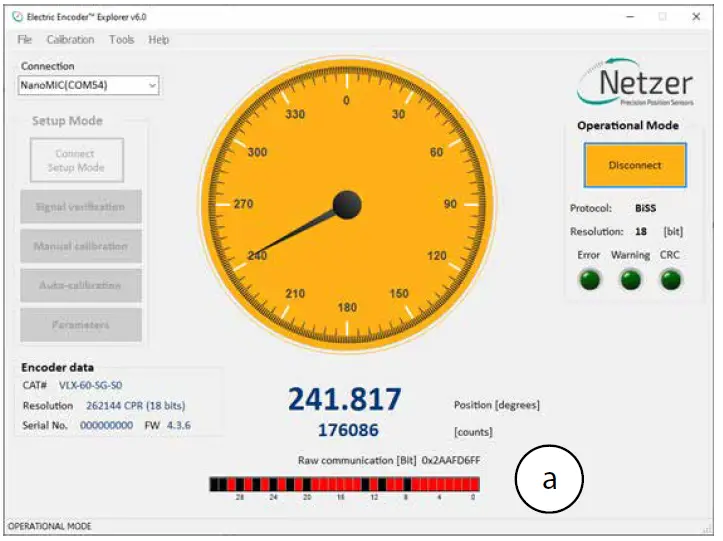
Indikasi Mode Operasional antarmuka encoder SSi / BiSS sayogi nganggo NanoMIC pikeun nyambung sareng encoder. Nalika dina Modeu Operasional warna dial posisi nyaéta oranyeu.
Kanggo inpo nu leuwih lengkep baca ngeunaan NanoMIC on Netzer websitus
Modeu operasional ngagunakeun antarmuka SSi / BiSS kalayan laju jam 1MHz. Posisi-dial encoder diwarnaan oranyeu nalika dina Modeu Operasional. Bar handap dial nu, nyaeta kaluaran kecap binér pakait pikeun posisi aci ayeuna (a).
Protokol SSi
Protokol BiSS
Markas Perusahaan
ISRAEL
Netzer Precision Posisi Sénsor ACS Ltd.
Taman Industri Misgav, Kotak Surat 1359
DN Misgav, 2017400
- Telepon: +972 4 999 0420
AS
Netzer Precision Position Sensors Nyarita.
200 Main Street, Salem
NH 03079
- Telepon: +1 617 901 0820
- www.netzerprecision.com
Hak Cipta © 2024 Netzer Precision Position Sensors ACS Ltd Sadaya hak ditangtayungan.
Dokumén / Sumberdaya
 |
Netzer Precision VLP-247 Aci kerung Rotary Encoder Kit Encoder [pdf] Pituduh pamaké VLP-247, VLP-247, VLP-247 Hollow Shaft Rotary Encoder Kit Encoder, VLP-247, Hollow Shaft Rotary Encoder Kit Encoder, Shaft Rotary Encoder Kit Encoder, Rotary Encoder Kit Encoder, Encoder Kit Encoder, Kit Encoder, Encoder |



